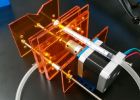
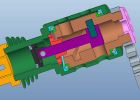
3D tryckt spruta Pump Rack (26 / 29 steg)
Steg 26: Instaling Firmware

Nu när du har pumpen wired och allt ihop, ansluta USB-kabeln till Arduino Nano till din dator och ladda upp den sprutpumpen kod.
Glöm inte att importera Acellstepper bibliotek till mappen Arduino.
Den final koden bör icke blockerande och bör ständigt kontrollera hallgivare av säkerhetsskäl.
Obs: Detta är inte den final koden, du kan använda den för att testa, jag kommer att uppdatera koden så snart jag kan.
#include < AccelStepper.h >
AccelStepper stepper (1, 9, 10); driver steg riktning
char userInput [21] = {hade ', '0', '0', '0', '0', '0', 'v', '0', '0', '0', '0',' 0',' v','0 ','0 ','0 ',' 0','0 ','d ','1 ', "\r"};
int deslocamento = 0; int volym = 0; int mspeed = 1; int mdirection = 0; int data = 0; int microstepping = 16. int msg_lenght = 0;
void setup() {Serial.begin(9600); stepper.setMaxSpeed(1000.0); stepper.setAcceleration(1000.0); stepper.setCurrentPosition(0);}
void loop() {
Delay(500);
om (data == 0) readuserdata();
om (data == 1) {
deslocamento = röding (userInput [1] - 48) * 10000 + char (userInput [2] - 48) * 1000 + char (userInput [3] - 48) * 100 + char (userInput [4] - 48) * 10 + char (userInput [5] - 48);
volym = röding (userInput [7] - 48) * 10000 + char (userInput [8] - 48) * 1000 + char (userInput [9] - 48) * 100 + char (userInput [10] - 48) * 10 + char (userInput [11] - 48);
mspeed = röding (userInput [13] - 48) * 10000 + char (userInput [14] - 48) * 1000 + char (userInput [15] - 48) * 100 + char (userInput [16] - 48) * 10 + char (userInput [17] - 48);
mdirection = röding (userInput [19] - 48);
om (mdirection == 0)
deslocamento =-1 * deslocamento;
annat
deslocamento = deslocamento;
Serial.println(""); Serial.Print (deslocamento, DEC); Serial.Print(""); Serial.Print (volym, DEC); Serial.Print(""); Serial.Print (mspeed, DEC); Serial.Print(""); Serial.println (mdirection, DEC);
stepper.setSpeed(mspeed);
stepper.setMaxSpeed(mspeed);
stepper.runToNewPosition(deslocamento*microstepping);
stepper.setCurrentPosition(0);
data = 0; deslocamento = 0; volym = 0; mspeed = 0; mdirection = 0;
för (int jag = 0; jag < = 21; i ++)
userInput [i] = 0;
}
}
void readuserdata() {
char tmp;
IF(Serial.available()) {
msg_lenght = Serial.available();
Serial.Print ("meddelandet längd =");
Serial.Print(msg_lenght);
om (msg_lenght == 20) {
tmp = Serial.read();
om (tmp == hade ") {
userInput [0] = tmp;
för (int jag = 1; jag < = msg_lenght; i ++) {
tmp=Serial.Read();
userInput [i] = char(tmp);
}
data = 1;
}
}
}
}

3D tryckt spruta Pump Arduino baserat

Hur man gör en liten systrar ADAM spruta.

Attack av Gourdzilla: Dino-pumpa

Enkel spruta pumpar

Smart Halloween pumpa lampa

LEGO NXT Laser gravör

Gör en vikning Plotter som skriver ut kretsar på textilier
DIY sprutpumpen med Stepper Motor

Bärbar Table Top Air Cooler

Tryckta kretskort (PCB) spruta maskin
3D tryckta pump

Mini luft/vatten pump bildar en 5ml spruta

Fixa en 400W dimma maskin Pump

3D-tryckt Biologically-Inspired Robotics

Super Cool 3D tryckta provrör vas!

Bygga en Z-Rack Whiteboard

Berni. 3D tryckta gemensamma för öl flaska möbler

Ugnsbakad färsk pumpa munkar
