Arduino 4WD rover bluetooth kontrolleras av Android telefonen/tablett (1 / 5 steg)
Steg 1: Vad du behöver...

För att bygga ditt eget Arduino 4wd rover bör du köpa alla nödvändiga delar från din önskad butik.
De flesta av dem kan köpas på ebay och amazon eller andra online elektronik/hobby butiker.
Jag försöker sätta några länkar men de kunde vara föråldrade och inte arbetar, i detta fall prova söka delen manuellt efter namn. Ledsen för detta.
Hur som helst är det en mycket enkel robot kit göras vanligt av ett chassi, fyra Dc (upp till 12V) motorer med gearmotor och fyra hjul.
De delar som användes är:
- 1 st chassi komplett med 4 likströmsmotorer, brukar kallas Arduino rover 4wd, till exempel detta:
http://www.troniqa.com/Rover-robot/222-kit-Rover-4...
Dessa är liknande:
http://www.robotshop.com/en/dagu-4WD-chassis.html
http://www.robotshop.com/en/Whippersnapper-runt-ro...
http://www.robotshop.com/en/juniorrunt-Rover-kit.h...
- 1 st Arduino uno R3 eller Arduino Leonardo styrelse
- 1 st Bluetooth-modul HC-06 med adapter styrelse eller motsvarande (måste vara slav modell), till exempel detta:
http://www.troniqa.com/shop/139-modulo-Bluetooth-h...
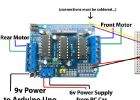
- 1 st L298 bridge dubbla motor styrkort, till exempel detta:
http://www.troniqa.com/moduli/525-modulo-l298-CONT...
Det finns många olika av dessa men ordningen på pinout är 99% samma för alla.
Bara Anslut trådarna till rätt stift baserat på styrelsen diagrammet. med den här guiden kan du hitta databladet för den jag använt (se nästa steg).
- 3 st 3.7V 1200mA (eller fler) Li-Ion laddningsbart batteri AA storlek eller 11, 1V 1200mA LiPo batteripack.
Om du använder AA storlek batteriet kan du lägga dem i en batterihållare.
- 1 st Jack kontakt för Arduino elkontakten.
- 1 st 1Kohm motstånd.

Hur till backningen och restaurera Android telefonen/tablett

RC bil hacka - bluetooth kontrolleras via Android app
En annan Arduino fjärrkontroll bil kontrolleras av Android-telefon med Bluetooth-modul

Installera Linux på din Android telefonen/tablett (root krävs)

Chroma Key på din Android telefonen/tablett

Nybörjarguide till att bygga Arduino robotar med Bluetooth och Android

Spåras Robot Bluetooth kontrolleras av Arduino Via Android ansökan
Arduino Bluetooth RC bil (Android kontrolleras)

Arduino Bluetooth kontrolleras båt - fartyg

Arduino Bluetooth kontrolleras RC bil
Gör Android telefonen bli en Bluetooth File Transfer Profile (FTP) Server

Arduino Ble Rover

Enkla multi-mode 4wd Rover JR-001

Hur man styr en arduino bil via Bluetooth (för nybörjare)

Hur man bästa ren telefonen, tablett eller annan elektronisk enhet

Hur man gör en super enkel telefonen/tablett stå

Arduino för nybörjare, nu med data plottning, kontrolleras av Android, utan kodning, ingen lödning behövs.

Arduino/Android - BLUETOOTH servomotor kontroll Android APP
