Arduino-baserad optiska varvräknare (5 / 6 steg)
Steg 5: Att sätta alla ihop





Jag byggde en KNex ram där överarmen kan glida upp och ner och används gummiband för att säkra de ledningar som går till LED och fototransistor, men du kan vad du kan hitta - LEGO, Popsicle pinnar, stel tråd, oavsett.
Du kan testa om det går runt och programmet fungerar genom att ladda ner skissen till Arudino och använda fingret för att bryta ljusstrålen mellan LED och fotodetektor. Varje gång du bryta strålen, bör status-LED växla på och av. Du kan aktivera följetong bildskärmen i Arduino programvaran och du bör se en "0" att vara ute varje sekund. Om du bryta strålen några gånger, bör "0" ändras till ett fåtal.
Om det fungerar, är du redo att integrera motorn.
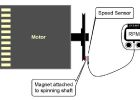
Får motorn snurrar med tejpen på spolen, kontrollera detektor kretsen arbetar och seriell bildskärmen är på, sedan skjut motorn mellan LED och detektor. Om allt fungerar, bör VARVTALET på motorn Visa på serial skärmen på datorn.
Bästa prestanda har jag hittills var runt 1200 varv/min. Lämna synpunkter om du göra bättre och vad du gjorde annorlunda!

Läst RPM från Arduino-baserad IR-varvräknare med MATLAB GUI

Åtgärd RPM - optisk varvräknare

Infraröd varvräknare med Arduino

DIY Digital RPM varvräknare | RPM Counter med Arduino

DIY cykel varvräknare

Arduino-baserad byta spänningsregulatorer
Rengör och Smörj en varvräknare kabel

Hur man öppnar en Honda CB/CX/GL stil varvräknare och hastighetsmätare

Spåra din bil med en Arduino-baserad Lojack

Att införa Climaduino - Arduino-baserad termostaten du styr från din telefon!

Hard Drive varvräknare för en stationär dator

Arduino-baserad Bi-color LED Matrix Flappy fågeln spel

Arduino-baserad skugga larm

Låg höjd miljöövervakning med en Arduino baserade väder Instrument och Aeropod Remote Sensing plattform

Linkit en bärbara varvräknare Noncontact

Varvräknare

Reparera en Motor cykel varvräknare nålen

Hur man installerar en varvräknare