Arduino-baserad optiska varvräknare (4 / 6 steg)
Steg 4: programmering

Du kan hämta den "skissen" för programmet nedan.
Funktionen rpm_fun är funktionen avbrott som kommer att anropas när data på pin 2 ändras från hög till låg (en fallande puls). Det uppdaterar den globala rpmcount, sedan växlar status-LED.
void rpm_fun() {//Each rotation, detta avbrott //function körs två gånger, så beakta //that för //calculating RPM //Update greve rpmcount ++; //Toggle status ledde om (status == låg) {status = hög;} annat {status = låg;} digitalWrite (statusPin, status);}
Setup initierar variabler, konfigurerar seriella parametrar, anger pin lägen och ställer in funktionen avbrott.
void setup() {Serial.begin(9600); //Interrupt 0 är digital stift 2, så det är där //the IR detektor är anslutna //Triggers på fallande (ändra från hög till låg) attachInterrupt (0, rpm_fun, faller); //Turn på IR-LED pinMode (ledPin, produktionen), digitalWrite (ledPin, hög), //Use statusPin att blinka tillsammans med avbryter pinMode (statusPin, produktionen); rpmcount = 0; rpm = 0; timeold = 0; status = låg;}
Loop funktion, är som namnet antyder, den huvudsakliga behandlingen loop som "går för alltid" medan styrelsen drivs upp. De första uttalande förseningarna under en sekund (1000 millisekunder), men observera att avbryta funktionen kommer att bryta i varje gång värdet av stift 2 ändras och köra funktionen rpm_fun. Efter 1 sekund försening, avbrottet är tillfälligt inaktiverad (detta inte kanske är nödvändigt, men verkar säkrare) då RPM beräknas baserat på antalet avbrott och förfluten tid mellan nu och förra gången beräkningen uppstått. Resultatet skickas tillbaka till datorn via den seriella porten, då avbrottet är återställd.
void loop() {//Update RPM varje andra delay(1000); //Don't process avbryter under beräkningar detachInterrupt(0); rpm = 30*1000/(millis() - timeold) * rpmcount; timeold = millis(); rpmcount = 0; //Write det ut till seriell port Serial.println(rpm,DEC); //Restart avbryta bearbetning attachInterrupt (0, rpm_fun, faller);}
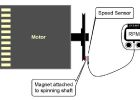
Observera att sättet motorn och IR-detektorn har konfigurerats, varje enskild tur av spolen kommer att resultera i två övergångar, så beräkningen tar det i kraft. Samma sak skulle inträffa för två bladig fläkt eller propeller. Om bara ett ljust avbrott per varv inträffade, såsom en svängande arm, skulle beräkningen vara:
RPM = 60*1000/(millis() - timeold) * rpmcount;
För en tre bladig fläkt, skulle beräkningen vara:
RPM = 20*1000/(millis() - timeold) * rpmcount;

Läst RPM från Arduino-baserad IR-varvräknare med MATLAB GUI

Åtgärd RPM - optisk varvräknare

Infraröd varvräknare med Arduino

DIY Digital RPM varvräknare | RPM Counter med Arduino

DIY cykel varvräknare

Arduino-baserad byta spänningsregulatorer
Rengör och Smörj en varvräknare kabel

Hur man öppnar en Honda CB/CX/GL stil varvräknare och hastighetsmätare

Spåra din bil med en Arduino-baserad Lojack

Att införa Climaduino - Arduino-baserad termostaten du styr från din telefon!

Hard Drive varvräknare för en stationär dator

Arduino-baserad Bi-color LED Matrix Flappy fågeln spel

Arduino-baserad skugga larm

Låg höjd miljöövervakning med en Arduino baserade väder Instrument och Aeropod Remote Sensing plattform

Linkit en bärbara varvräknare Noncontact

Varvräknare

Reparera en Motor cykel varvräknare nålen

Hur man installerar en varvräknare