Arduino Hexapod (med en personlighet) (6 / 7 steg)
Steg 6: Koden...

Här är en grundläggande genomgång av koden:
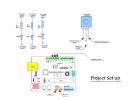
Det börjar genom initierar pins, ange servon till deras center position strukturerna omgivande ljus avläsningar från LDR.
Det första huvudsakliga loopen gör är att kontrollera batteriet nivå... eftersom ingen kommer någonstans utan batteri: p
Om batteriet är ovanför minimivärdet loopen ska fortsätta framåt... annars hexapod kommer loss alla servon och snabbt flash är det blå LED, som visar en förändring av batterier behövs.
Den kontrollerar sedan ljuset läsa över huvudet... att se om roboten är att vara klappad eller inte. Om alla är väl roboten går in i hinder avoider läge och börjar gå runt.
Om du pet robot på huvudet (försiktigt)... dess LDR kommer att känna förändringen i ljusintensitet och roboten kommer glatt svaja under din hand.
Du kan titta på alla dessa funktioner i videon!

DIY handgjorda Hexapod med arduino (Hexdrake)
#MyoCraft: gest-aktivera din Arduino projekt med en Myo armbindel

Nybörjarguide till att bygga Arduino robotar med Bluetooth och Android

Arduino termometer med Sensor LM35 temperatur
Kontrollera en Arduino ombord med en infraröd fjärrkontroll

Använda LEGO Mindstorm RCX ljussensor med Arduino (Program med Visuino)

Arduino - Theremin med 7 Segment LED Display

Driva din Arduino Uno med fyra uppladdningsbara AA-batterier

Kontrollerande Arduino Uno med Javascript!

Foto resistor kontrollerade arduino pong med bearbetning

DIY Arduino termometer med DS18B20

Styra Arduino RoverBot med TV-fjärrkontrollen

RS485 Seriell kommunikation mellan Arduino Mega och Arduino Nano med Visuino

Arduino-torget med färg LCD
Arduino eluttag med exponerade stift

Hur man läser en arduino kort med LabVIEW

Arduino Nano med Ethernet Shield

Tweeting Arduino larm med en PIR-sensor. aka AlarmIno
