Arduino Laser gravör (4 / 11 steg)
Steg 4: Stegmotorer + drivrutiner






Några detaljer om de valda komponenterna är nedan:
Stepper Motor (qty:2)
NEMA 23 storlek
1.8Nm holding torque (255 oz-i)
200 steg / revolution (1,8 grader Stegvinkel)
Upp till 3.0a nuvarande
Vikt - 1,05 kg (de är riktigt tung!)
Bipolär 4 tråds anslutning
Stepper Driver (qty:2)
Digital stegmotor drivrutin
Microstepping funktion
Utgång nuvarande 0.5a till 5.6A
Output nuvarande limiter (minskar risken för överhettning motorer)
Styrsignaler: steg och riktning ingångar
Puls Input freq upp till 200kHz
20V-50V likspänning
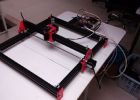
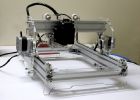
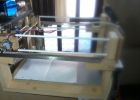
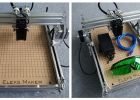
För varje axel, den motoriska direkt driver ballscrew genom en motor koppel. Motorerna är monterade på ramen med hjälp av två aluminium vinklar och en aluminiumplatta. Aluminium vinklar och plattan är 3mm tjock, och är starka nog för 1kg motor utan att böja.
Obs: Det är verkligen viktigt att korrekt anpassa motoraxeln och ballscrew. Jag kopplingskomponenter har några flex att kompensera för mindre fel, men om justeringsfel är för stor, de att misslyckas!

Arduino Laser gravör trä Design!

DIY Arduino Laser gravör

CNC Laser gravör med GRBL och Arduino
Laser gravör med arduino

3W 4'x 4' Arduino Laser skärare/gravör
DIY 5500mW Laser gravör / Cutter

GearBest laser gravör DIY Kit monteringsanvisningar

Frankenstein Laser gravör

Laser gravör 2.5W A5

LEGO NXT Laser gravör

Pocket laser gravör.
Ännu en DIY Diode Laser gravör

Med Zen Toolworks CNC med Laser gravör

NEJE 300mW Laser gravör (Under $100)

DVD till Laser gravör
Benbox med Eleks Laser gravör (GearBest /Banggood)

Snabb, smutsiga och billig laser gravör

Bärbar CoreXY Laser gravör
