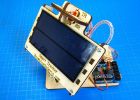
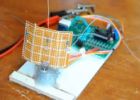
Arduino & Lego Solar Tracker (dubbla axeln) (4 / 7 steg)
Steg 4: Program
jfr bifogade .ino fil
/ * SOLAR TRACKER 1.0
* av Mathias Leroy
* Novembre 2014
*
*/
INITIERING
//------------------------------------------------
#include / / sprintf
#include / / servo bibliotek
Servo servoH; pin09 horisontell servo
Servo servoV; pin10 vertikala servo
analog läsa pin-anslutningar
int analogPinTopLeft = 0; gul grön
int analogPinTopRight = 1; grå blå
int analogPinBottomRight = 2; vit svart
int analogPinBottomLeft = 3; rödbrun
PARAMETRAR
//------------------------------------------------
int initAngleH = 80.
int minAngleH = 0;
int maxAngleH = 170;
int initAngleV = 90.
int minAngleV = 50;
int maxAngleV = 150;
int slowingDelay = 50;
int sesitivityH = 30.
int sesitivityV = 30.
int stepH = 10;
int stepV = 10;
VARIABLER
//------------------------------------------------
int angleH = initAngleH;
int angleV = initAngleV;
char printLine [50];
int valueTopLeft = 0;
int valueTopRight = 0;
int valueBottomRight = 0;
int valueBottomLeft = 0;
SETUP
//------------------------------------------------
void setup()
{
servoH.attach(9);
servoH.write(initAngleH);
servoV.attach(10);
servoV.write(initAngleV);
Serial.BEGIN(9600);
Serial.println ("redo!:-)");
}
LOOP
//------------------------------------------------
void loop()
{
Serial.println ("<<< börja slinga---");
Läs värden
valueTopLeft = analogRead(analogPinTopLeft);
valueTopRight = analogRead(analogPinTopRight);
valueBottomRight = analogRead(analogPinBottomRight);
valueBottomLeft = analogRead(analogPinBottomLeft);
skriva ut värden
sprintf (printLine, "%d | %d \n", valueTopLeft, valueTopRight); Serial.Print(printLine);
sprintf (printLine, "%d | %d \n", valueBottomRight, valueBottomLeft); Serial.Print(printLine);
Delay(3000);
beräkna medelvärden
int averageTop = (valueTopLeft + valueTopRight) / 2;
int averageRight = (valueTopRight + valueBottomRight) / 2;
int averageBottom = (valueBottomRight + valueBottomLeft) / 2;
int averageLeft = (valueBottomLeft + valueTopLeft) / 2;
skriva ut medelvärden
sprintf (printLine, "- %d - \n", averageTop); Serial.Print(printLine);
sprintf (printLine, "%d - %d \n", averageLeft, averageRight); Serial.Print(printLine);
sprintf (printLine, "- %d - \n", averageBottom); Serial.Print(printLine);
Delay(slowingDelay);
Övergripande beslut & action
Serial.Print(angleH);
Serial.Print("\n");
om ((averageLeft-averageRight) > sesitivityH & & (angleH-stepH) > minAngleH) {
gå vänster
Serial.Print ("kommer vänster");
Serial.Print("\n");
Delay(slowingDelay);
för (int jag = 0; jag < stepH; i ++) {
servoH.write(angleH--);
Delay(50);
}
}
annars om ((averageRight-averageLeft) > sesitivityH & & (angleH + stepH)
vertikala beslut & action
Serial.Print(angleV);
Serial.Print("\n");
om ((averageTop-averageBottom) > sesitivityV & & (angleV-stepV) > minAngleV) {
går upp
Serial.Print ("kommer");
Serial.Print("\n");
Delay(slowingDelay);
för (int jag = 0; jag < stepV; i ++) {
servoV.write(angleV--);
Delay(50);
}
}
annars om ((averageBottom-averageTop) > sesitivityV & & (angleV + stepV)
Serial.println ("---avsluta Loop >>>");
}

Arduino DIY Solar Tracker

Solar tracker med arduino - från varje dag material

Stegmotor + Arduino + Solar Tracker (EV)

Arduino 2-axlig servo solar tracker

Arduino Solar Tracker med lysdioder!
Enkla Dual Axis Solar Tracker

DIY Solar Tracker

Dual axis solar tracker med online energi monitor

Bärbar Solar Tracker (ingen microcontroller krävs!)

Internet Enabled Solar Tracker

DIY Mini Solar Tracker

ARDUINO MPPT SOLAR CHARGE CONTROLLER (Version-3.0)

Arduino GPS/GSM Tracker
Enkelverkande PIC kontrollerade Solar Tracker DIY Kit
Klockan baserat solar tracker experiment

LEGO Display hyllor dubbla lager

Bärbar Solar Tracker Project - kretsdesign och Breadboarding

Arduino Lego EV3 motor controller spara $45
