ARDUINO MPPT SOLAR CHARGE CONTROLLER (Version-3.0) (38 / 39 steg)
Steg 41: Översikt över Version-3.1
Efter mycket provande konstaterade vi att MOSFET (Q3) i ver-3.0 design brinner upprepade gånger. Vi försökt att modifiera den befintliga programvaran men inte hitta något tillfredsställande resultat.
Det andra problemet var att MOSFET Q1 (i V-3.0) beteende även när det finns ingen sol ingång. För att lösa ovanstående problem och öka kraften hantering kapacitet ändrar vi både hårdvara och mjukvara. Detta namnet Version-3.1 laddningsregulator.
Denna version är inte klar ännu. Så vänta tills den är klar.
Oroa dig inte vi gör en lösning för dem som har gjort V-3.0 prototypen. Efter lite modifiering kommer vi att kunna använda den nya mjukvaran.
Du kan se uppdateringar på Hackaday.com
Denna version har 3 alternativ.
1. 5 amp version:
T94-26 toroid, 48 varv på AWG20 tråd att ge 135 uH (det tar nästan 1,5 m tråd)
Q1, Q2 och Q3 alla par av IRFZ44N MOSFETs (6 i alla).
C1 kommer att vara 3 * 220 uF låg ESR kondensatorer parallellt, C2 kommer att vara en enda 220 uF låg ESR kondensator
Enda ACS712 på panelen sida enligt version 3.0
2. 8 amp version:
106-26 toroid såret med 23 vänder en förening tråd tillverkad av 3 delar av AWG20 tråd tvinnad tillsammans för att ge 47 uH (detta tar ca 3,1 m tråd).
F2 blir ett par FDP150N10A MOSFETs parallellt.
C1 blir 5 * 220 uF låg ESR kondensatorer parallellt, C2 kommer att vara en enda 220 uF låg ESR kondensator
Två ACS712, en på panelen sida enligt version 3.0 och en i serie med batteriet.
3 10 amp versionen:
T130-26 toroid såret med 23 vänder en förening tråd tillverkad i 4 delar av AWG18 tråd tvinnad tillsammans för att ge 41 uH (detta tar ca 4,5 m tråd).
F2 blir ett par FDP150N10A MOSFETs parallellt.
C1 6 * 220 uF låg ESR kondensatorer parallellt, C2 kommer att vara 2 * 220 uF låg ESR kondensatorer parallellt.
Tre ACS712, en på panelen sida enligt version 3.0, i serie med batteriet och i serien med lasten.
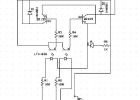
Driva kretsen (gemensamt för alla 3 versioner) kommer att använda 3 separata IR2104 föraren marker, en för varje Q1, Q2 och Q3. Vi kör Q1 och Q2 drivrutiner från pin D9 och HO1 HO2 och Q3 bilresa från pin D10 och LO3.
I föraren marker 1 och 2 stift stift IN och SD drivs parallellt av Arduino utdata D9. Driver 1 (för Q1) det finns ett lågpassfilter RC i serien, med en tidskonstant av ca 1 ms. Driver 2 drivs direkt (som i strömkretsen, men förmodligen med ett något högre serie motstånd att möjliggöra mer aktuell Q1 föraren och dess RC filter).
I driver chip 3, IN drivs av D9 och SD drivs av D10.
Syftet med att använda separata drivrutiner för Q2 och Q3 är för att vi ska stänga Q3 att driva i asynkron läge på låga nuvarande nivåer när den kommer att vara i DCM (diskontinuerliga nuvarande läge). Det kan finnas ett bättre sätt att göra detta men under den korta tid vi har tillgänglig detta är ett enkelt alternativ och enkel och pålitlig att genomföra.
Alla 3 versioner bör ha LCD-displayer, WiFi, LED-indikatorer (kanske med en mer fancy kodning separat ange DCM och CCM).
Alla 3 versioner bör kunna klara av antingen 18 V eller 30 V paneler och använda algoritmer som stoppar dem bränna ut om panelen kan producera mer aktuell än betyg tillåter. Detta kan alla vara auto-detect.
Alla komponenter utsätts för panel spänning måste vara klassad för minst 40 V (i synnerhet C1 och vår buck converter att generera 12V för förarna och att driva kontrollelektronik.

Arduino solar storma controller + effektreglering och data loggning online med Xbee WiFi

3 kanal arduino Powered Christmas Light Controller!

Plugduino - baserade Arduino 120 Volt outlet controller

Solar Charger Bag

AMSC - Arduino Multimedia och Skype Controller

BASERADE ARDUINO MPPT sol LADDNINGSREGULATORN
PWM Arduino fläkt hastighet controller

Arduino powered Solar Battery Charger

EL Wire - Arduino Mini Pro - relä Controller modul 6 kanaler

Arduino Time-Lapse Panorama Controller

DIY Arduino baserad MIDI fot Controller

Sallad för livet - Arduino 101 baserad automatiserad Controller för Hydroponics, Aeroponics, kretsloppsodling, Etc. Intellekten Curie

Använda en Arduino med en N64 controller

Arduino Lego EV3 motor controller spara $45

Arduino Windows och PS3 Controller

Arduino DIY Solar Tracker

Arduino kontrollerade Solar fontän

Arduino polisen lampor (ATMega 2650 Version) ** ny Flash mönster! **
