Automatiserad bromssystem (4 / 4 steg)
Steg 4: arbetar







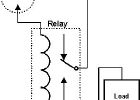
Denna bil består av en RF-sändare, mottagare av 27MHZ, arduino uno r3, infraröd sensor, motorn förarens, servomotor. När mottagaren tar emot signalen bilen rör sig därför i sin väg, om hinder upptäcks servomotor ändras dess vinkel och därför bromsarna kommer att tillämpas för några sekunder och svans ljus bil glöder, just då mottagaren stängs även om sändaren sänder signalen att gå vidare utan ytterligare åtgärd sker fram till denna försening av tid. efter denna operation hindret har flyttas om bromsarna måste vara släppt som inte är praktiska i verkliga livet, så har jag programmerat det på ett sådant sätt att även om hindret är närvarande identifieras eftersom det finns inga hinder och på det ögonblick svans ljuset slocknar servomotor skiftar tillbaka till första position och bromsarna kommer att släppas så att vi kan vända bilen på denna försening av tid , sensorn igen kommer att upptäcka hinder och bromsarna används om bilen inte har återförts inom denna försening av tid.

Automatiserad SOS

Automatiserad gardin med intel Edison & thethings. IO

Automatiserad imma sprouter

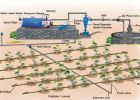
Hur till bygga en helt automatiserad hydroponiska toalett trädgård

Automatiserad studiemiljö med Intel Edison

Automatiserad kycklingfarm

ARUPi - en billig automatiserade inspelningsenhet för ljudlandskap ekologer

Automatiserad pneumatisk knappen Pusher

Automatiserad webb testning i Ruby med Watir-Webdriver

Automatiserad Instructable visningar och favoriter Checker

Automatiserad alla korn elektriska öl bryggeri för 100 euro/USD

Kocken insidan INTEL(CII) - framtiden för automatiserad husmanskost (INTEL IoT)

Automatiserad vattning av krukväxter med Intel Edison

Automatiserad godis Dispenser

Automatiserad Garden

Automatiserad örtagård - Edison

Automatiserad belysning med DMX och Perl
GSM baserade automatiserade bevattningssystem med regn-Gun