Automatisk Espresso Loader (5 / 7 steg)
Steg 5: Programvara/kontroll

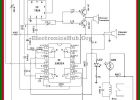
Som det nämnts ovan, systemet styrs av Parallax Propeller MSR1 board, kör ett anpassat program för SPIN.
Programvarans algoritm kan fördelas linjärt. Det fanns ingen anledning att ha samtidig rutiner kör, och så bara en kugge var använder för enkelhetens skull. Programmet först definierar konstanter, som främst omfattar stiften för servon, tryckknappar och DC-motor. LCD information och klockfrekvens fastställs också.
Nästa, tre objekt kallas: Servo32v5, serial-uttaget och debug_lcd. Servo-objektet används för lätt servo kontroll (utan att behöva krångla med timing pulser). LCD-objektet används för att initiera och skriva till LCD-skärmen. Slutligen, serial-uttaget används för diagnostiska ändamål, och har inte någon roll i slutprodukten.
Nästa, de två variabler som användaren väljer definieras: smak och sköt storlek.
Slutligen, huvudprogrammet kan börja. Servon ställs först in till stängt läge LCD och visar sedan ett välkomstmeddelande.
Efteråt, smak subrutinen kallas, som sedan uppmanas användaren att smaken. Efter lämplig nyckel pressa upptäcks, sköt subrutinen kallas, som uppmanar användaren att skott storlek. Efter lämplig nyckel pressa upptäcks, väntar programmet på OK för att tryckas. Efter OK upptäcks, kallas dispensering subrutin. Dispensering subrutinen sedan sätter ränna till förbestämda position, öppnar lämpliga ventilen under en lämplig tidsrymd och stänger ventilen. Efteråt, kompakt subrutinen kallas, som flyttar ränna ur vägen för en mer kompakt, och kallar compacter två gånger. Därefter visas ett meddelande som "gjort" och rutin är klar.

Knex dubbel - Decker - What-The-Hecker flipperspel instruktioner

Espresso / enda brygger kaffebryggare automatisk vatten filler

Automatisk desktop fan

Automatisk inköpslista

1 minuts irländska Espresso

Hacking Cuisinart SupremeGrind för Espresso

I-Sink Espresso Knock Box

Göra espresso kaffe med en moka pot

Min bästa Espresso Machineless Latte

Perfekt Espresso med Aerobie Aeropress och Hario Skerton

Snabb Spets: Brew bra Espresso med den gyllene regeln

Stovetop Espresso (Moka)

Choklad Espresso Amaretto Cupcakes
Automatisk dörrklockan System med objektet upptäckt
Automatisk lödkolv Power avstängning krets
Automatisk tvättrum Light Controller krets

Automatisk öppning låda med Arduino

Automatisk hallen löpare ljus