Automatisk knytnäve stötfångaren (3 / 5 steg)
Steg 3: Koden för arduino för ledningarna för först av de stöta
denna kod som jag fick från seraine's instructable()
Jag gjorde bara ett par ändringar till ursprungliga koden som hur långt servo snurrade och hur snabbt den flyttas men det är ganska mycket det. så speciellt tack till seraine.
KODEN
#include < Servo.h >
Servo myservo;
int pos = 0;
länge osignerade int lowIn;
länge osignerade int paus = 5000;
booleska lockLow = sant;
booleska takeLowTime;
int pirPin = 12; Digital pin ansluten till den PIR produktion
int pirPos = 13. ansluter till den PIR 5V pin
void setup() {
myservo.attach(4);
Serial.BEGIN(9600);
pinMode (pirPin, ingång);
pinMode (pirPos, produktionen);
digitalWrite (pirPos, hög);
Serial.println ("kalibrera sensorn");
för (int jag = 0; jag < 30; i ++) {
Serial.Print("-");
Delay(1000);
}
Serial.println();
Serial.println("Done");
medan (digitalRead(pirPin) == hög) {
Delay(500); Serial.Print(".");
}
Serial.Print ("sensorn aktiv");
}
void loop() {
IF(digitalRead(pirPin) == hög) {
för (pos = 0; pos < 90; pos + = 1)
{
myservo.write(POS); berättar servo gå för att placera i variabel "pos"
Delay(5); väntar på servo att nå ställning
}
för (pos = 90; pos > = 1; pos-= 1) //goes från 90 till 0 grader
{
myservo.write(POS);
Delay(50);
}
IF(lockLow) {//makes säker på att vi väntar på en övergång till låg innan ytterligare produktionen görs
lockLow = false;
Serial.println("---");
Serial.Print ("rörelse upptäckts på");
Serial.Print(Millis()/1000);
Serial.println ("sec");
Delay(50);
}
takeLowTime = sant;
}
IF(digitalRead(pirPin) == låg)
{
IF(takeLowTime) {
lowIn = millis(); Spara tiden för övergången från hög till låg
takeLowTime = false;
}
om (! lockLow & & millis() - lowIn > pausa) {
gör säkert detta kodblock endast körs igen efter
ett nytt förslag sekvens har upptäckts
lockLow = sant;
Serial.Print ("motion slutade på"); utgång
Serial.Print((Millis() - paus) / 1000);
Serial.println ("sec");
Delay(50);
}
}
}

Desktop knytnäve stötfångaren

Med hjälp av sångaren Futura (CNC symaskin vid piren 9)

Automatisk inköpslista
Automatisk dörrklockan System med objektet upptäckt
Automatisk lödkolv Power avstängning krets
Automatisk tvättrum Light Controller krets

Automatisk öppning låda med Arduino

Automatisk hallen löpare ljus

Brian är automatiska persienner

Automatisk dolda blad (Assassin's Creed)

Automatiska sprinklersystem som alla kan göra!

Automatisk trädgård Sprinkler

Automatisk anläggning vattning enhet
Automatisk växten vattnas enhet (enkel version)

Automatisk växten vattnas System

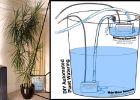
Automatisk vattning från en vatten fat

Awesomely automatisk Garden vattning Buddy - komplett med reservoar för näringsämnen.

Automatisk flytta Halloween rekvisita
