Automatisk utjämning Laser Cross (7 / 11 steg)
Steg 7: Arduino




Design: Arduino läser X och Y spänningar från accelerometern. Om de inte är "noll" skickar signaler till öst-väst och Nord-syd steppers motorer. Motorerna Vrid skruvarna som placerar den övre plattformen. Så när plattformen är nivå, accelerometern kommer läsa kommer att noll och steppers sluta. När det är nivå, gäller det även power laser-diod.
Jag lade också till ett par växlar. Som församlingen blandas runt kan det förlora kalibrering så en switch kommer att sätta det i kalibrering läge.
Stepper motors kräver mer ström sedan Arduino kan leverera så jag använde en ULN2003 Darlington drivrutin. Varje motor kräver fyra förare. ULN2003 har endast sju kretsar. Så jag lagt till en BS170-FET för åttonde kretsen. Den andra BS170 är för att skicka ström till laser.
Power: Laser enheten kretsen är konstant ström så spänningen är inte kritisk, men det föreslås det vara över 7Vdc. För enkelhetens skull ville jag motordrivna så jag använde sex AA uppladdningsbara batterier i AdaFruit innehavaren. Med fulladdat NiMh batterier ger ca 8.4Vdc. Denna tillförsel laser och stepper motors direkt. Jag satte en 5Vdc regulator på PCB för Arduino.
Församling: Arduino är grundläggande Arduino återställning som jag har i min S.T.O.C.K.:S $10 Arduino. Den är placerad på bordet så att det finns utrymme för ULN2003. Jag tänker inte gå in på en Point-to-Point-församling som jag är Lazy. Jag tog med en schematisk och bilder av toppen och botten.
Förtydliganden: Mitsumi M35SP9 stegmotorer. Jag använder örnen Schematisk programvara. Jag kunde inte hitta något i närheten av en stegmotor så jag använde en center knackade transformatorn istället. Stiften är inte numrerade på Motor PCB så jag gjorde upp nummer enligt bilden. Dessa motsvarar de schematiska nummer. Dessa motorer hade en kontakt med sladdar på dem (en gul och en svart) så jag bara fast dessa direkt till min Arduino PCB.
Jag lödda vissa vit tråd wrap kablar till MMA7361 adapter board, 5Vin, 3.3Vout, Gnd, Xout och ungdom. De andra ändarna gick till min Arduino PCB.
Jag hade en 2,1 mm jack som jag fast min Arduino PCB. Jack ansluts till laser enheten.
Jag kopplade bara två av de fyra piano-typ växlarna.
Vad jag kallade RS232-kontakt ansluts till en USB-BUB eller min USB-adapter:
Jag borrade dig också hål i bottenplattan att fästa Arduino PCB. Jag faktiskt borrat hålen för nära kanten av PCB så de avbröt. Men jag hade nog att sätta muttrarna på bultarna. Eftersom min drilling noggrannhet är dåligt, jag bara tvingade bultarna i bottenplattan och brydde sig inte om att sätta nötter på andra sidan.
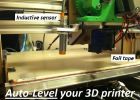
Aktivera automatisk utjämning för din 3D-skrivare med en induktiv (Marlin Firmware)

Justerbar Z Probe för säng automatisk utjämning (i3 Prusa stil)

Hur man gör en Lego automatisk utjämning rymdfarkost

Själv utjämning kopp innehavaren 2.0

Själv utjämning belysning riggen

Enkel och billig aceton utjämning

Professional RIAA utjämning med analog elektronik

DIY själv utjämning cykel ljus montera

Heavy Duty utjämning fötter på de billiga!

Installera en utjämning Kit på en F150 (2004 +)

Med hjälp av en utjämning Iron

Lätt lång frisyr med en utjämning järn

Själv utjämning Gimbal mugghållare

Reparera breda sprickor & utjämning grov doppar i trottoaren

CO2 Laser Cross pekaren

Utjämning med sittsäckar

PLA och PETG utjämning Experiment

Stötdämpande själv utjämning kamerafästet
