AVR Chronograph från koncept till PCB (12 / 13 steg)
Steg 12: Installation och drift





Den svåraste delen om inrättandet av denna sak är att få något att hålla sensorer där de behöver vara. Jag byggde några trä står som ni kan se på bilderna, men något stabila att du kan träna skulle bli bra. Jag tänkte på ett par av stativ, men jag hade inte den extra pengar för att köpa ännu en andra (för att inte nämna en 3: e och 4: e en!) Det kan vara ett alternativ för dig om stativ finns redan i din samling av godsaker.
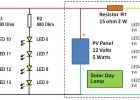
Ledningarna är enkel. Schematiskt visar ledningarna i samma fysiska orientering som faktiska terminalerna. Det finns en 12V och en grund för varje sensor och de två terminalerna som går till transistor switchar är från givarens utsignal. Logiken i styrenheten kommer att titta för input stiften att gå från 5V till 0V att indikera en upptäckt. Så, vara säker tråd oavsett vilken sensor du använder så att de skickar 12V till växeln transistor medan det är att se målobjektet eftersom vrida transistorn "på" drar ingångsstiftet låg. Min sensorer kan kopplas in Hursomhelst så detta var lätt. Om du upptäcker att din sensorer kan inte fungerar på detta sätt, då du kan helt enkelt Invertera logiken i programvaran marker. (Jag kan hjälpa med det om du har problem. Du måste ändra denna rad i koden: EICRA | = (1 << ISC11) | (1 << ISC01); ändra från avtryckare på negativa gå kanten till positiv gå kanten...)
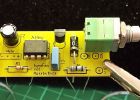
När sensorerna är anslutna kan bestämma hur långt ifrån varandra du vill ha dem i fötterna. Sedan använda första 4 dip-switchar, ange numret i binär (0000 för 16 och 1000-1111 för 1-15. LSB är till vänster. ledsen om någon förvirring.) Power styrelsen och kontrollera avståndet är korrekt med knappen "Visa avstånd" (SW4, bild 2.)
Ställ in sensorerna på detta avstånd. Inte antar; Använd ett måttband. Sätt din mätning kommer att vara så exakt som möjligt. På denna punkt jag vinkar min hand framför sensorer bara för att se allt arbete. Gör ett par långsamma pass att få låga siffror och sedan snabbt för att få större siffror. Om du gå långsamt och få ovanligt många, timern svämmade över. Om detta handlar om hastigheten på dina målobjekt bör du ändra sensorn avståndet till ett lägre värde. Sammanföra sensorerna närmare kan du mäta långsammare objekt utan att förlora precision.
Så, det är alla drivs, sensorer justeras och mäts avståndet så exakt som möjligt... Låt dina målobjekt gå! förhoppningsvis sensorer skulle kunna se den första tiden ut och nu kan du se hastigheten på displayen. Kom ihåg sista 2 dip-switchar? Om de är båda då är utslaget i MPH. Ta en titt på tabellen längst ner på schematiskt för andra Utdataalternativ för. Växla till KPH och göra matten. Var det rätt?

DIY ALLT I EN DATOR; Koncept till verklighet "komplett"

Älskling, jag krympte Arduino: flytta från Arduino till ATtiny och skriva din kod i ren AVR-C

Montering av Dragon Rider 500 för användning med AVR Dragon

Konvertera en NES gamepad till USB med Arduino
PCB UV-exponering enhet

GameCube Controller till Wiimote

Designa en Expansion PCB (Intel® IoT)

Snabb Digital termometer med billiga USB till TTL omvandlare och DS18B20 - utan Arduino eller Raspberry Pi

Universal programmerare för AVR: s och S51 plus ZIF socket!

Billiga AVR/51 Development board

Schweiziska AVR kniv

LED Cube med Arduino och anpassade PCB
PCB isolering spår fräsning med MyDIYCNC Desktop CNC maskin

Lägga till knappar i musen

En ram för att göra prisvärda & eleganta modulära styrsystem (USB till MIDI, gömde sig, eller seriella)

Projektor lampa konvertering till LED
Hur man löda din fumeFan PCB KIT / några PCB KIT
Tillägg lysdioder för sol dag lampa
