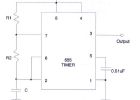
Basic (PWM) varvtal kontroll med 555 Timer ICs (1 / 8 steg)
Steg 1: En snabb titt på DC-motorer och varvtalsreglering

En DC-motor är en enhet som omvandlar elektrisk energi i en roterande mekanisk energi. Det är en två lead-enhet som har en roterande axel rotera med hjälp av elektromagnetisk induktion med varvtal beroende medföljande ström eller spänning. Allmänt, motorerna är lågt motstånd enheter (ca 5 till 20ohms) när du mäta resistansen mellan dess två leder. Detta är på grund av att den interna strukturen av en motor består av spolar av magneten binder med upp till tusentals lindningar precis som en komplex electomagnet. Så du kanske tror att förse det med låt säga en 9V källa skulle leda till en mycket hög nuvarande passerar genom motorn. Detta är inte fallet men eftersom de inte är passiva enheter som en resistor och en enkel ohms gäller inte. Om du vill att veta det exakta förhållandet mellan spänning, strömstryka och fart i en motor, kanske du vill kolla referenser nedan för vidare läsning framför allt om du vill veta de specifika delarna också och en enkel demonstration av sin verksamhet.
Motorer i praktisk mening
Du kan tänka på det här sättet: du har en två terminal enhet som roterar vid tillämpad DC-spänning eller likström. Hur exakt är nu roterande rörelse beroende på spänning och ström? Praktiskt, skulle en ökning av spänning eller ström levereras leda till ökad rotationshastighet i form av revoltions per minut. Vi kan säga att vid 0 volt eller 0 ampere, motorn skulle upphöra att rotera och öka mängden av spänning eller ström bit för bit skulle gradvis öka rotationshastigheten av motorn. Men kom alltid ihåg att praktiska enheter har begränsningar och du kan uppenbarligen inte öka den tillämpad spänning/strömmen upp till infinity har en mycket mycket stor ofattbara rotationshastighet (minns ljusets hastighet?)
Om du väljer för att köpa en DC-motor, kan du bli tillfrågad om en märkspänningen. Och i vissa fall kan du läsa på etiketten vissa parametrar såsom märkspänningen och hastigheter. Vad jag lärt mig från en av min elektronik klass är att om du får en spänning och hastigheter, det betyder bara att motorn skulle rotera på det nominellt varvtal om du förse det med en spänning lika med märkspänningen. Att veta märkspänningen skulle också säga något om utbudet av spänningar som du kan leverera för att inte skada motorn. Märkspänningen berättar du också på vad spänning motorn körs de flesta effektivt som anges av Paul Scherz i sin bok [1]. Du kan förse motorn med en spänning mindre än märkspänningen och motorn skulle bara roterar långsammare. Om du har en DC motor är dimensionerade för 9V, du kan förse det med en 1V DC-källa eller batteri och i vissa fall motorn skulle rotera mycket långsamt medan i vissa fall, skulle det upphöra att rotera. Om du har DC-motor till hands, kan du kontrollera om vad är minsta matningsspänningen behövs för att orsaka rotation. Leverera en spänning som är större än märkspänningen är där du måste vara försiktig. På denna punkt kan motorn börja värma upp eftersom du öka utbudet ytterligare och fortsätter vidare framåt kommer att leda till en doomsday apokalyps.
Nr belastningen och laddat scenario
I princip när vi talar om en DC motor med last, som är den tid när vi faktiskt lägger det till god användning. Men nog om de enkla orden. Det betyder att motorn är nu den som orsakar laddade mekanismen till funktion. Du kan använda det för din remote kontrollerade bilar, i en generator, en elektrisk fläkt (när du ansluter fläktblad) etc. Den viktigaste konsekvensen av ansluter en belastning till motorn är att det hindrar rotation av motoraxeln främst eftersom det är en extra tyngd och en extra vridmoment som krävs för att rotera den. Det skapar friktion i någon mening som saktar ner rotation. Motorn tenderar sedan att upprätthålla rotationshastigheten ursprungligen hade ingen manöverledningarna. För att uppnå detta, drar den ström som handlar om hundra eller till och med tusen gånger dess initialt utan belastning som är aktuella för en viss konstant Matningsspänning. I detta projekt är motorn på inga manöverledningarna eftersom vi endast tittar på speed-parametern som svar på en PWM-signal. Dessutom skulle vi vilja att minimera strömförbrukningen när du testar kretsen senare.
Metoder för varvtalsreglering
För att kontrollera hastigheten på motorn, måste vi styra vissa elektriska parametrar som direkt påverkar dess hastighet. Naturligtvis måste vi justera spänningen och strömmen till den.
Ett sätt är att vid konstant Matningsspänning, kanske du vill sätta en variabel resistor(potentiometer) i serie med motorn att justera/begränsa den nuvarande som den drar under drift. Det dåliga med denna metod är att genom att begränsa de nuvarande flöde förändringarna värdet av serien motståndet vilket också förändringar spänningen över motorn. När motorn är laddad, drar det en betydligt stor mängd nuvarande vilket ökar makten över serien motståndet. Makten över motståndet kommer bara att omvandlas till slösas bort värme.
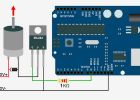
Ett annat sätt är att använda en gemensam emitter integrerade transistor konfiguration med motorn som lasten för att justera strömmen genom motorn genom att ändra matningsspänningen vid korsningen av transitor base-sändare. Detta är dock svårare att förutse eftersom relation mellan Vbe och Ic av transistorn är exponentiell. Förutom ytterligare transistor begrepp som du måste hålla i åtanke, avleder transistorn sig extra energi som värme.
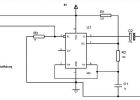
Ett annat alternativ och förmodligen den mest populära bland metoder för kontroll av hastighet är puls bredd moduleringen. Denna metod skapar en signal av spänning eller nuvarande byter från on(HIGH) och off(LOW) med bestämda intervaller på varje stat och en definierad konstant frekvens övergripande. Observera att denna typ av spänning signalen skulle fortfarande ser ut som en konstant DC-spänning som ses av motorn. Om du anger en DC-motor med en 9V och en switch men du trycker ständigt växla mellan på och av minskar den genomsnittliga spänning som ses av motorn vilket minskar sin hastighet.
För en mer detaljerad diskussion om PWM, vi nu gå vidare till nästa steg.
Referenser:
[1] i kapitel 13, praktisk elektronik för uppfinnare av Paul Scherz (2000)
[2] kapitel 22, encyklopedi av elektroniska komponenter Vol.1 av Charles Platt (2013)

Enkel (och smutsiga) puls bredd modulering (PWM) med 555 Timer

Motor Driver med 555 Timer IC
Cirkelträning Diagram av vattennivån larm med 555 Timer
PWM Lamp Dimmer med NE555 Timer

Automatisk vattenkran med 555 timer
Blinkande LED med 555 Timer

Blinker med 555 timer

Kusliga ljud med 555 Timer

Krets planering: Skapa en Dual blinkande LED krets på Protoboard med 555 Timer

Enkla alternativ LED blinkar med 555 timer

Enkla elektroniska Piano med 555 timer i CD-fodralet
Astable Multivibrator med 555 Timer

Star Trek Red Alert ljudeffekt (med 555 timer)

Bultande/blekning/blinkande LED med 555 Timer

Blinkande LED Railroad lampor gjorda med 555 timer

Time Lapse Intervalltimer för systemkameror med 555 timer IC

Automatisk LED night light (med 555 timer)
Väggen efter Robot med 555 Timer