Bygga en Doodle Bot kit från DAGU (12 / 13 steg)
Steg 12: Ledningar upp roboten!





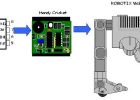
Till skillnad från standard Arduino styrelser har den här domänkontrollanten några extra funktioner vilket gör det särskilt lämpligt för små robotar. Det har en dual DC motor förare som kan hantera upp till 2.5A per motor och servon kan anslutas direkt till PCB.
De digitala I/O pins avslutas i ett 3 pin male huvud som innehåller kraft för servon och sensorer. Kraften kan väljas mellan + 5V eller + batterispänningen. Normalt + 5V används. Om du väljer + batteri då du ska bara ansluta kan servon till dessa pins som en högre än 5V spänning skada digital stiften.
Doodle Bot har 2 digitala sensorer och en liten servo att inte kommer under tung belastning så vi måste välja + 5V att förhindra skador på de digitala ingångarna.
Nästa vi måste ansluta motorerna. Du kan se på kontrollstyrelsen att motor utgångarna är märkta "ML" och "Herr" för motor till vänster och höger motor. När det gäller Doodle Bot, "ML" utdata är på höger sida och "Herr" utdata är på vänster sida. Detta är så att USB-uttaget på baksidan av roboten.
Ansluta den rätt motorn till "Herr" utgång och ansluta vänstra motorn till "ML" utdata. Ägna stor uppmärksamhet åt färgen på trådarna. När roboten kör exempelkoden första drag bör göra är att resa fram en kort bit, och sedan tillbaka upp och vrid moturs.
Om antingen motor går bakåt i början av exempelkoden sedan bytte att motorn måste ha det är kablarna över. När roboten har gått framåt och sedan vänt lite, om roboten visar först medsols måste du byta vänster och höger motors.
Kontrollera att strömbrytaren är i läge off och ansluta batterihållaren som visas. Registeransvarige har Polaritetsskydd så om du av misstag ansluter dessa trådar på fel sätt roboten inte skadas. det brukar bara slå på.
Nu ansluta din hjul encoder sensorer och servo. Observera att den svart/brun tråden går alltid på utsidan av PCB. Vita eller gula kabeln är alltid närmast processorn.
Kontrollera att rätt hjul sensorn ansluts till D2 och vänstra sensorn ansluts till D3 annars roboten kommer att sluta springa runt i cirklar med en motor stannade och andra motorn arbeta kontinuerligt.

Bygg en transistor testare kit
Hur man rita bilder och skapa typsnitt med hjälp av exempelkoden Doodle Bot

Barndomen Laser: Bygga en HeNe Laser Kit

Bygg din egna prototyper Kit...

Hur man bygger en Roomba Bot

Fender Tweed Deluxe 5e3 klon bygga baserat på TAD Tweed Deluxe Kit
Bygga en Mini-Walking Bot

Autonoma/RC mänskliga Bot

DIY Robotics projekt - Barnabas-Bot 2.0

Sumo-Bot (TSA och Science Olympiad regler)

Arduino 4wd robot med ping sensor "J-Bot"

Småbarn Bot 3000 av Adam Fujita. Röst aktiverat pedagogiska föräldraskap tool!

22 grundläggande elektronik kretsar gjorda med Electra I - modulära elektronik utbildning KIT

Hur till bygga din egen rörliga Tardis!

Hur man bygger en T.E.A. Laser

Woody UI Kit

3D tryckta spektrometer, använda offentliga Lab DIY kit.

Introduktion till byggnad enskild survival kit
