CS4985 Projekt: rörelse Scanner (2 / 5 steg)
Steg 2: Steg 2: förbereda delarna




Första saker först, kan få våra delar redo. Om du valt att ta sträckan patricier och använda en kartong, göra säker där du anger din Arduino bakbord, servo och ledningar hål för sensorn placeras. Se till Arduino hamnar någonstans där du kan koppla in den i lätt (du kanske måste göra ett annat hål för detta, som jag har). Du kan använda någon metod som du tycker passar för att säkra dessa till rutan. Jag använde zip band för att säkra saker på plats. Se till att också göra ett hål för botten på servon och trådar av sensorn för att passa genom, helst nära varandra.
Ett annat viktigt steg är att lägga ditt ledningar till servo och sensor. De flesta hobby servon är kvinnliga endast, så om du vill driva det via bakbord som jag har, du kommer att behöva använda hane-hane hoppare ledningar. Som jag fann mest servon använder olika positioner för marken, se 5v, och data kablar, till att du ser upp vilka kablar är som tidigare. Sensorn behöver kvinna till manliga hoppare ledningar att även nå bakbord och Arduino. Jag gick vidare och färgkodade min all min tråd, för att eliminera förvirring. Med hjälp av elektrisk tejp och zip band att hålla trådarna ihop och bunta ihop specifika typer kommer kraftigt att hålla saker snyggt.
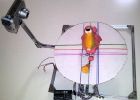
När du är klar med det, se till att placera din servo på en plats utanför lådan, helst i ett fack där det och dess ledningar kan sitta i rutan medan dess e-gear är utanför den. Köra sensor trådarna genom hålet du gjort och på insidan.
En sista steget är att säkra sensorn till servo. De flesta servon kommer med flera avtagbara delar som du kan placera på den. Hitta en som fungerar, som ett X formade en, och fäst den i området mittemot sensorns stift. Denna del är ganska knepigt, och hur det görs måste vara upp till dig. Något sätt är bra, så länge delen kan ansluta sensorn till servo och sensorn ser fram emot (eller som någonsin riktning du vill att det ska se ut).

Sea glas grej - Jack Daniels frigörelse projekt
Ultra Low Cost 3D Scanner

Vinka JT - Larson Scanner med Joule tjuv

Cylon - Larson Scanner Kit - med Charlieplexing!

DIY High-Speed bok Scanner från skräp och billiga kameror

3D-miljö Laser Scanner från början
Raspberry Pi dokument Scanner med automatisk belasta upp till Dropbox.

Att lägga till rörelsekontroll en projektion klocka
2010 POWERPOINT projekt: ansikten
Galaxen Scanner! (göra planetariska bilder hemma)

Hemlig rörelse aktiverat ghost projektor (AKA BOO rutan)

Vacker Pompeji stil Decoupage projekt (konst ingår)

FLÄTA den BLÄCKFISKEN - ett hantverk projekt för barn åldrarna 4 -10

Påse rörelse larm för identitetsstöld förebyggande

Att lägga till nycklar till en Arduino Synth den hårda vägen-Blacklord: Organ Donor projekt del 2

Fyndpris bok Scanner från en kartong.

En SciFi Scanner/Ray Gun film prop
123D scanner - hem gjorde 3D-Scanner
