Datorstyrd RC bil med två Arduinos (3 / 8 steg)
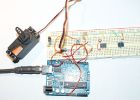
Steg 3: Ta emot Arduino: kablage och byggnads.




Det kräver både RF-mottagare och L293D chip.
RF-mottagare:
Stiften på RF mottagaren märkta GND är marken. DATA ut är där den mottagna signalen kommer att skickas. VDD är makt för chip och MYRA är för antennen som tillval.
-Ledningar:
RF-mottagare är ansluten separat från L293D chip. Marken går till en av marken hamnar på Arduino. Strömmen i går till den Arduino 5V utgång och DATA ut ska anslutas till stift 13 på Arduino. Antennen kan lämnas löst och senare anslutna till RC-bil antenn.
L293D chip:
Stiften på L293D chip som visas i diagrammet ovan. EN1 och EN2 är motor aktivera stiften. De fungerar som en mästare på/av-knapp för varje motor. In1 och IN2, IN3 IN4 är de ingångarna som styr riktningarna av varje motor. Om drivs IN1 inte och IN2, blir motorn på OUT1 och OUT2 ett sätt. Likaså om ingångarna är nonchalansen, så också är utgångarna och motorn kommer att vända åt andra hållet. 0V är marken och + V är makten för chip. + Vmotor används som en separat strömkälla för motorerna.
-Ledningar:
Ledningarna för l293D chip är inte så komplicerat som det kan se ut. Den + V och + Vmotor stift ska anslutas till och extern strömförsörjning. I detta projekt kommer vi att få ansluta dessa till batteripaketet från RC bilen. IN1 och IN2, IN3 IN4 stiften kopplas till stift 3,4,5 och 6 på Arduino. Två motor aktivera stiften är anslutna till stift 9 och 10 på Arduino. OUT1 och 2 stift gå till en motor och UT3 och 4 gå till den andra. Det spelar ingen roll vilket i pins vilket stift på Arduino eller som ut stiften går to som leder på motorn som dessa definieras i koden.

Hur man gör en trådbunden Rc bil med en Arduino

Spåra din bil med en Arduino-baserad Lojack

Kontroll Arduino RC bil med android telefon & 1Sheeld

Arduino RC bil med FPV Camera

Autonoma Arduino bil med infraröd närhets-Sensor

No.03 ratt köra R/C bil med Arduino, webbkamera och net. USB etc. Men detta är krypande och 4WS (4 hjulsstyrning)

Arduino RC bil med lång räckvidd och anpassade sändare.

Fries'Car - vegetabilisk olja bil med Arduino

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)

1. BM ARDUINO kontrollerad bil med HC-SR04

Bearbetning kontroller R/C bil med XBee moduler

Hur man styr alla R/C bil med ett flygplan sändare!
Kontrollera en RC servomotor med en Arduino och två momentan växlar

Gest kontrollerade robotic bil med android ansökan

RGB LED Tutorial (med en Arduino) (RGBL)

Kontrollera en Raspberry Pi RC bil med ett tangentbord

Fixa min garageport med en Arduino UNO

ARD-e: roboten med en Arduino som en hjärna
