Diri - aktiverade heliumballong (4 / 6 steg)
Steg 4: Electonics


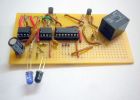
Komponenter
Jag trodde att det skulle vara häftigt att ha en ballong som tar bilder och videor. Jag ville också några hinder detektering och stabilisering.
Därför lagt jag tre ultra sonic sensorer (1). två till upptäcka allt på framsidan höger och vänster och en till mäta avståndet till taket. Jag havn't hade problem med störningar (även om det nämns i databladet, du behöver använda kedja se http://www.maxbotix.com/documents/LV-MaxSonar-EZ_Datasheet.pdf det enda viktigt var att sensorerna måste peka tillräckligt isär, kottarna inte överlappa som sonar kommer från sensorer stör varandra. Det gör en sensor som upptäcker ett hinder när i själva verket är bara en annan sensor bränning ljud för att göra det jobb.
Gyrsocope (2) stabiliserar rörelsen efter roterande. Viktigt är (till skillnad från visas i bild där allt bara kastas in i höljet), att du valde en axel (i mitt fall var Z) och justera den så mycket som möjligt så det är parallellt med marken. Så kommer att rotation av ballongen resultera i gyroskopet mäta förändring på Z-värdet bara. Självklart kan du använda några fancy matte annars, men detta fungerade bra för mig. Jag bara fast sensorn till balsa trä styrelsen och som redan var tillräckligt för att få det att fungera.
Den GoPro (3) är bra för initierar bilder distans och slutligen H-broar (L293D) för motorer + rekvisita (4). H-bron power linjer måste anslutas direkt till batteriet, går inte över arduino eftersom motorerna producerar en massa oväsen! Detta kan göra avläsningar från sensorerna oanvändbar. Men kom ihåg att ansluta marken av H-broar till arduino dock. Dessutom måste H-broar vara ansluten till PMW stiften ska fungera korrekt.
Om du är modig kan du ta en Mini-USB-kabel isär och Lägg till GoPro över USB-kontakten till din krets genom att ansluta + till VCC på din adruino och marken. På så sätt kan du ta ut batteriet för GoPro och du sparar ganska lite vikt! Här kommer resultat i mindre operativa tid dock. Som ballongen inte behöver någon ackumulatorn förmåga att hänga i luften, batteriet (3,7 V 1000mAh är bra) varar ca 2h med enstaka bild tar. Spöklik kan samma batterier från olika företag ha olika vikter, så försök att få med så mycket mAh som möjligt men som också är lättaste.
Anslut (komponent -> Arduino)
Ultraljudssensorer
Power + Ground -> Arduino VCC och marken
BW -> A0, A1, A3 (minns inte varför jag hoppade över A2, förmodligen ingen anledning)
Gyro + Accelerometer
Power + Ground -> Arduino VCC och marken
SDA (stift över GND) -> Arduino SDA (A4)
SCL (stift över SDA) -> Arduino SCL (A5)
H-Bridge
PIN 4,5,12,13 -> Arduino GND
PIN 1,8,9,16 -> Arduino RAW
Stift 2 -> Arduino stift 11
Stift 3 -> Motor 1.a
Stift 6 -> Motor 1.b
Stift 7 -> Arduino stift 10
(samma sak gäller för andra H-bron med Motor 2 + 3)
Nästa koden!

Installera överföring på FreeNAS 8.0.4 Embedded/Full

Rörelse aktiverad säkerhet kameran använder Intel Edison

Attiny85 som steg/Dir Stepper Motor Controller

D-Link trådlös Router DIR-628 installation [utan CD]

RabbitPi - Alexa aktiverad IFTTT ansluten, örat-vickar IoT assistent

Ljud aktiverad kamera avtryckare för hög hastighet fotografering

Använd en NFC aktiverad telefon att skanna ett fingeravtryck och hitta det valda kortet från en riktig kortlek!

MrRobot - Ubuntu Mobile app aktiverad Robotics (Raspberry Pi och arduino inblandade)

SMS aktiverade Man Cave tecken och musik ljuslåda

Ljud aktiverad lyser upp skjorta

Arduino EL wire controller (ljud aktiverad)
RabbitPi - den Alexa aktiverad IFTTT ansluten, örat-vickar IoT assistenten

En söt Shotgun aktiverad Robot leksak!

Aktiverade passiv dynamisk walker

ESP8266-1 aktiverade RC vände Wifi bil med webbläsare kontrolleras riktning.

Multi-användning magi hylla-Qi-aktiverade, inbäddade magneter

Arachnio e-post-aktiverade rörelsesensor

Dark aktiverad switch