DIY RC/Arduino åkande jeep låg kostnad konvertering (6 / 6 steg)
Steg 6: sista handen och fältet provkörning







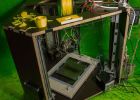
Jag ville ha en nödsituation stopp-knappen. Det enda jag hade på hand var Jeep gaspedalen. Så monterade jag det på baksidan av lådan med en slips wrap att hålla den i till-läge. Jag var har min fräsar händig när du testar jeepen och skär slips wrap för att skära motor spänningen av om något gick fel. Jag har inte varit nödvändigt hittills.
Jag lade också till en 30 amp säkring i serie med den nödstopp, mitt i raden motor spänning.
Jag använde två 6 volt 4,5 Ah förseglat bly-syra batterier så att motor spänningen kan väljas manuellt vara 6 eller 12 v. Med 12 volt, och utan ytterligare Jeep och brand lastbil vikt flyttade min bil för fort. Jag fast med 6 volt bara. Det har nackdelen att dränera ett av batterierna snabbare än den andra. Jag kan leva med detta.
0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 - 0 -
Som alltid ger forska, att komma ihåg eller åter studera tekniska ämnen, montering, kabeldragning, montering, testning, etc timmar av lärande, skam, frustration och allmänt kul.
För ett framtida projekt, jag skulle vilja göra denna rover några bildar av autonoma eller lägga till mörkerseende kameror och förmåga att vara driven och styrs av en förare i en avlägsen plats (ok, kanske nästa dörr i början).
Jag kommer att visa detta projekt för mina studenter i kommande år, när jag kommer att vara min skola Robotics tränare, förhoppningsvis motivera dem till att göra saker från tidig ålder. Ses nästa projekt!
DIY delta 3D skrivare med låg kostnad återvunnet delar

DIY billiga Arduino mobil utvecklingsplattform

DIY billiga Arduino kompatibel Flex/bend Sensor gjort utan statisk påsar, av hushåll objekt: D

Hur man bränner Arduino Bootloader med Magnolia styrelsen (kostnad och storlek av Pack av tuggummi KickStarter)

DIY fix för Jeep Cherokee/c blandning dörr fel

DIY LCD-Arduino shield

#DIY # tiny Arduino(without Crystal)

DIY! Awesome Arduino!!!. #Xolcano.com

RC lastbil på Arduino Robot w / flera sensorer
Arduplane - baserade Arduino rc flygplan i mindre än 50$.

Sous-vide Arduino Shield

DIY Toyota Prius nyckelbricka

Noll kostnad järn mannen bågreaktorn

Arduino HC-SR04 (med LCD)

Arduino PS/2 tangentbord Smart gränssnitt

Arduino atmega644/1284 klon

Ansluta Arduino Uno till Crystalfontz 16 x 2 OLED med bara 4 trådar!

Spara värden i din Arduino permanent minne
