DTMF-ROBOT (utan mikrokontroller) (1 / 6 steg)
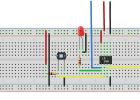
Steg 1: krets

Vi har ändrat vår krets sju gånger på grund av fel och tillgänglighet för ICs' samtidigt bygga våra projekt......
Och detta är den slutliga kretsen av vårt projekt...!
LISTAN ÖVER NÄTVERKSKOMPONENTER:-
1. DTMF AVKODARE modul
2. 4 x 16 dekoder (74LS154) (active låga resultat)
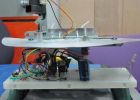
3. chassi och inriktade motorer...
4. Perf styrelse
5. dubbel H-bridge motor driver modul (L293D IC )
BEARBETNING AV KRETSEN:-
1. produktionen av mottagaren telefonen matas till DTMF AVKODARE med AUX-kabel...
2. DTMF AVKODARE avkodar DTMF-toner och ger 4-binary utgångarna...
3. dessa resultat från DTMF avkodare matas till ingångarna till 4 X 16 dekoder med sladdar... becoz jag vill ha fler utgångar och extra utgångar kan användas för lysdioder osv...
4. 0 utgångsstiftet 4 X 16 avkodaren används inte... eftersom det är alltid låga när indata inte ges...
5. så vi kan använda andra 15 stift... och vi har hårdkodade programmerade roboten så att
Om vi trycker på 1--fram
2--omvänd
3--rätt
4--vänster
6. resultat 1 matas till framåt och framåt stiften på modulen motorn förarens genom dioderna.. .so båda motorerna gå vidare.. .so som roboten rör sig framåt... (din motor driver stift kan ändras så det är bara göra reverse engineering)
7. utgång 2 matas till omvänd och omvänd stift för motordrift modul... så båda motorerna gå bakåt... så att roboten rör sig bakåt...
8. jag tror du kan vara lite förvirrad med hjälp av dioder... de bara används för att stoppa omvända flödet av signal...
Om du inte förstår vad jag sa bara bort dessa dioder och se felet...
9. utgång 3 och 4 är anslutna till framåt 1 och vidarebefordrar 2 motor föraren efter dioderna... så om någon av motorn rör sig framåt med en annan motor i off stat.. .den robot vänder...
10. du kan lägga till extra krets för att visa andra vad tonar vi precis fått... genom att ansluta förstärkaren parallellt med AUX-kabel... (som är frivillig)

Linje efterföljare Robot utan Arduino eller Microcontroller

Enkel trådlös Robot utan Microcontroller

RGB LED STRIP färg orgel (utan MIKROKONTROLLER)

En mycket god ROBOT med mikrokontroller 89c 51.

Rörelse aktiverad Robot (utan kodning)
DIY enkel flamma efter Robot utan Microcontroller

Robot med mikrokontroller

Hinder undvika Robot med IR-sensorer utan Microcontroller

Hexabot: Bygga en tunga sex ben robot!

Bygga en autonom Robot Wall-E

Lätt bygga min egen användbara Robot för mindre än $100

Hemmet gjorde line-spårning robot
Väggen efter Robot med 555 Timer

"DIY - utmärkt linje TRACER roboten utan MICROCONTROLLER"

Hett lim gjutning: Instructables Robot {LED bakgrundsbelyst}

En annan enklare inverterad pendel Robot

Hur att utforma och bygga en bekämpa robot

Hur man gör en Makeblock fjärrkontroll 2WD Robot
