Fireant Plenum Robot









Detta bot byggdes för att arbeta i plenum och andra trånga utrymmen.
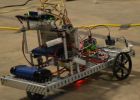
Jag byggde den här lilla killen för två år sedan för att köra Cat5/6 och koaxialkabel genom övertrycken utrymmen (öppna platser ovan tak och under golv). Under åren han har sett en hel del åtgärder och har varit en tillgång i något litet utrymme som kräver en titt eller en ljus praktiskt tillvägagångssätt.
FireAnt övertrycken robotens funktioner:
- 2.4Ghz kamera
- 2,4 Ghz sändare
- Pan och tilt arm med klo fäst
- Ultra ljusa LED strålkastare
- Larmsignalen för plats genom ytor
- Gummi tank slitbanor för förbättrad dragkraft
- Byggt från sturdy, skador resistenta glasfiber
- Stöttålig väska
Detta är en IBM/PC och Mac/Linux kompatibel seriell enhet.
För att använda Fireant övertrycken roboten, allt du behöver är en dator som kan acceptera en USB-transceiver, och ett program som kan prata med seriella enheter på 9600 baud. Sådana grundläggande program inkluderar spackel eller om du vill få mer kreativ en skiktning program som att behandla kan du automatisera kommandon.
Avlägsen kontrollerade eller automatiserad användning.
Fireant övertrycken roboten har på dess hjärta en Arduino Uno R3 med en Adafruit Motor sköld. Denna kombination kan användas antingen med standard skissen, som gör att en domänkontrollant via mappas tangentbord pressar att använda den inbyggda i enheter, eller en annan skiss som är kodade för att utföra ett annat förutbestämt uppgift.
Jag vet detta är inte en steg för steg Instructable men jag har länkat de flesta delar i texten ovan. Använd gärna den bifogade uppförandekoden i ideella projekt, som kredit ges.

Gör en billig Fire Fighting Robot hemma.

Arduino Hexapod Avoider Robot

Barn Robot Bed

Gesture controlled robot

Fighter Robot Gizmo | Robowars | Battlebot
Hem Sentry Robot projekt för Intel-IoT turnén i Austin, TX av RoboDorks

Leopold Robotic dans plysch ödlan

Halloween robotic ryggsäck

Sparky - DIY webbaserade Telepresence Robot

Billig robot med inbyggd kod redaktör (PS/2 tangentbord koden input, EEPROM lagring)

Wooden Fire Pit

PulleyBot: En remskiva Driven Robot

Fire Bell Alarm Clock

Instructables Robot klockan

2D tecknad Animation av Instructable Robot

DIY Robot Cart (billigt + kraftfulla + snabb)

Enkel robot-låg förlorat-mycket användbart

2 rullar Android vikt kontrollerad robot
