Flight Simulator med Arduino och Python (5 / 9 steg)
Steg 5: Full Arduino kod
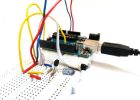
/ * Känsla vippning handlingen av en ADXL335 Accelerometer ochmatar ut data på den seriella porten (USB).
(c) Anthony Kelly, 2013 * /
/* void setup() { void loop() {
A0: x-axeln
A1: y-axeln
A2: z-axel
*/
int xpin = A0, ypin = A1, zpin = A2;
int swpin = 0;
int swState = 0;
int s, yAve, zAve;
int xTilt, yTilt, zTilt;
Serial.BEGIN(9600);
pinMode (swpin, ingång);
digitalWrite (swpin, hög); / / Aktivera Pullup på Switch stift
Kalibrera sensorn för nivå position genom att ta medelvärdet av 8 avläsningar
s = average(xpin);
yAve = average(ypin);
zAve = average(zpin);
}
xTilt = analogRead (xpin)-Nick;
yTilt = analogRead (ypin)-yAve;
zTilt = analogRead (zpin)-zAve;
swState = digitalRead(swpin);
Skicka Data som en seriell sträng enligt följande:
"xTilt, yTilt, zTilt, swState \n"
Strängen kommer att läsas av Python med linjer separerade med "\n"
Serial.print (xTilt, DEC);
Serial.Print(",");
Serial.Print (yTilt, DEC);
Serial.Print(",");
Serial.Print (zTilt, DEC);
Serial.Print(",");
Serial.Print (swState, DEC);
Serial.println();
}
Få ett genomsnitt av 8 avläsningar från "pin"
int genomsnittet (int pin) {
int Ave = 0;
för (int jag = 0; jag < 8; i ++) {
Ave = Ave + analogRead(pin);
}
returnera Ave/8.
}

Multiplexering med Arduino och 74HC595

Mugg musik: Förvandla vatten till ett Instrument med Arduino och ChucK

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

Hur använder gamla Stepper Motors med Arduino och A4988 Driver

Power övervakning med Arduino och logga in i Google blad

Roligt spel med arduino och bearbetning

Kontroll av en DC motor med Arduino och Visual Basic

Styra din Tv, Dvd och ljud system med Arduino och Android

Rörelseaktiverade ljus med Arduino och HC-SR04 sensor

Kapacitans mätare med arduino och 555 timer

Kontrollera en LED med arduino och Wifly sköld

Hur man styr motorer med Arduino och RC mottagare i 10 minuter

Styra DC Motors(PC Fans) med Arduino och Relay board

Kontrollerar ledde med Arduino och C#

Kontrollera en RGB ledde med Arduino och bearbetning

Spela upp ljud på dator med arduino och progduino
Läs/emulera fjärrkontroller med Arduino och Raspberry Pi

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi
