För Västbanken till Gaza Vol 1. Begränsning av rörelsefriheten (7 / 8 steg)
Steg 7: kod
i grund och botten när sensorn är en och en halv meter från väggen, ska servon börja arbeta
#define trigPin 12
#define echoPin 11 #include
ServoOne servo; Servo servoTwo; Servo servoThree; Servo servoFour; void setup() {Serial.begin (9600), pinMode (trigPin, produktionen), pinMode (echoPin, ingång); servoOne.attach(3); servoTwo.attach(5); servoThree.attach(6); servoFour.attach(9);}
void loop() {int varaktighet, avstånd, pos = 0, jag, digitalWrite (trigPin, låg), delayMicroseconds(2), digitalWrite (trigPin, hög); delayMicroseconds(10); digitalWrite (trigPin, låg), längd = pulseIn (echoPin, hög), avstånd = (längd/2) / 29,1; Serial.Print(Distance); Serial.println ("cm"); IF(Distance<150) {servoOne.attach(3); servoTwo.attach(5); servoThree.attach(6); servoFour.attach(9); servoOne.write(180); servoTwo.write(180); servoThree.write(180); servoFour.write(180); delay(30000); / / / / servoOne.detach(); / / servoTwo.detach(); / / servoThree.detach(); / / servoFour.detach(); / / delay(2000); servoOne.write(0); servoTwo.write(0); servoThree.write(0); servoFour.write(0); delay(30000);} annat {servoOne.detach(); servoTwo.detach(); servoThree.detach(); servoFour.detach();} delay(100); }

Mod armatur till låga watt PL

Hundens Back monterad läder kamera sele

RR.O.P. - RaspRobot OpenCV projekt

3D tryckt Cryptex

Att lägga till obegränsad minne i en EVO T20 med NT4e att göra en användbar dator
En bärbar ljud till ljus display, utan en mikroprocessor - Musicator Junior.

Hur till installera Mikroskop Fönstren XP Loopback adaptern

Hur till ändra och sätta ihop en NERF Raider CS-35 för mer kraft och räckvidd.

Tillämpa Augmented reality i mobila enheter som den framtida flygplats vägledningen (TfCD)
Hur till retur Workshop i framtiden: Visa ditt Space

Att lägga till Off-The-Shelf minne till en Cisco 871

ESP-03 uppgradera Flash minne till 128 M bit

Fenomenal Augmented Reality tillåter oss att titta på hur saker tittar på oss!

Nybörjare Guide till fiberoptik

Hur till bygga & användning A Dye-Sensitized solcell (PD) + en diskussion om energieffektivitet &
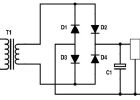
AC till DC ström med en Full Wave likriktare

Guide till Harbor Freight kuponger, erbjudanden och gratis saker

Anslut kameran till Zedboard
