Hur man gör en 2-hjul, IR-styrd, Arduino-kompatibel Robot (1 / 5 steg)
Steg 1: Uppfyller delarna (MP)




Hört talas om Arduino Uno? Om inte, är det här lätt programmerbar mikrokontroller som låter dig bygga coola produkter. Om du har någon erfarenhet, kom tillbaka till denna sida efter att lära sig om arduino uno.
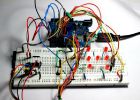
För de av er som vet om det, kommer vi att arbeta med en nära kusin till den, Adafruit Pro prydnadssak, 5 volt. Det kan köras på exakt samma kod som en uno, så inga nya IDE måste installeras. Blå PCB visas är Pro prydnadssak. Detta är i princip din robotens hjärna.
Som för vad din motors kommer att kontrolleras av, träffa TB66FNG H-bron. Den här killen kan din motors att röra sig i två riktningar, och tillbaka.
Vår robot att ta emot kommandon från vår fjärrkontroll kommer att, vi använda denna lilla svart lampa, kallas en IR-sensor. Det tolkar koden att fjärrkontrollen ger och skickar koden till prydnadssak. När en viss signal ges, säger det roboten att flytta i en viss riktning.
En annan touch till detta moderkort (4: e prototyp förresten) är neopixel. Det är vår indikator av vilken riktning är ett steg i vår robot. När du ändrar denna kod, är neopixel ett perfekt verktyg för felsökning av problem. Vi fullföljer vår kod så grön är framåt. röd är tillbaka; gul är kvar; och blå är rätt. Dessa val är tillval.

Hur man gör en gaming hjul
Hur man gör en elektronisk tärning med ARDUINO

Hur man gör en Skyddsväska för Arduino
Hur till DIY klo kran Arduino-kompatibel Robot?

Hur man färga din skate hjul och bussningar

Hur man åter buffra en baitcasting hjul

Hur man gör en kvadrat hjul

Hur man styr en Nixie rör med en Arduino

Hur man bygger din egna LED färg Organ || Arduino || MSGEQ7

Hur man använder en seriell Voice Recognition Module - Arduino handledning

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hur man mäter temperaturen mycket noggrant med en Arduino och en TSYS01 temperatur Sensor styrelse.
Hur man bränner optiboot botloader på Atmega8 med Arduino IDE 1.6.x och 1.5.x

Hur man använder en seriell WiFi sköld - Arduino handledning

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde

Hur man gör stapelbara pin headers för Arduino på billiga

Hur man analyserar ett fordons CAN-BUS med en Arduino ansluten till en CAN-BUS sköld och fri programvara.

Hur man sätter Roller Blade hjul på en Skateboard
