Hur man gör en 2-hjul, IR-styrd, Arduino-kompatibel Robot (4 / 5 steg)
Steg 4: ledningar

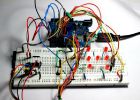
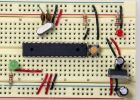
Ledningsdragning. Ingen är någonsin bra med detta. ... Naturligtvis om du inte har mycket erfarenhet. Och det är inte roligt! Någon som bilden ovan visar en fritz bild av hur banan ska se ut. Se upp, det ser inte exakt ut snyggt, så jag lämnar den ursprungliga fritz du redigera eller Observera dig själv så du inte visar förvirring. Men kommer det bara hämta ordentligt om du har fritz hämtade redan. Använd denna bild för att löda kablarna till rätt ställen exakt! Att lära sig om vilka stift går till där, här är en uppsättning instruktioner.
När du tittar på ett datablad för denna h bro, kommer du se 4 namn kallas Ain1 och 2, Bin1 och 2, Ao1 2, och Bo1 och 2. Alla Bs avser en motor, som gör så. Varje i eller input har en särskild PIN-kod på den fasad som det tilldelas. Ain1 går till stift 3 på fasad. Ain2 går till stift 4 på fasad. Bin1 går till stift 5 och Bin2 går till stift 6. Enkelt.
Här är en länk till en bild av ordningen av stiften:

Hur man gör en gaming hjul
Hur man gör en elektronisk tärning med ARDUINO

Hur man gör en Skyddsväska för Arduino
Hur till DIY klo kran Arduino-kompatibel Robot?

Hur man färga din skate hjul och bussningar

Hur man åter buffra en baitcasting hjul

Hur man gör en kvadrat hjul

Hur man styr en Nixie rör med en Arduino

Hur man bygger din egna LED färg Organ || Arduino || MSGEQ7

Hur man använder en seriell Voice Recognition Module - Arduino handledning

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hur man mäter temperaturen mycket noggrant med en Arduino och en TSYS01 temperatur Sensor styrelse.
Hur man bränner optiboot botloader på Atmega8 med Arduino IDE 1.6.x och 1.5.x

Hur man använder en seriell WiFi sköld - Arduino handledning

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde

Hur man gör stapelbara pin headers för Arduino på billiga

Hur man analyserar ett fordons CAN-BUS med en Arduino ansluten till en CAN-BUS sköld och fri programvara.

Hur man sätter Roller Blade hjul på en Skateboard
