Hur man kontrollerar DC-motorer med Arduino (4 / 4 steg)
Steg 4: Koden
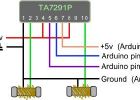
Följande kod visar grundläggande styrning av DC-motorer. Motor1 styrs genom digital stift 3 och 10. Motor 2 styrs genom digital stift 6 och 9. Dessutom kunde motorn förarens vara helt avstängd med analoga pin A2.
I funktionen setup() kan motor föraren genom att anropa setupMotor().
I de viktigaste loop kräver det funktioner om du vill flytta roboten framåt, vänster, bakåt och höger i sekvens. I varje steg väntar det 200 millisekunder.
Pins controller motorer
#define motor1_pos 3
#define motor1_neg 10
#define motor2_pos 6
#define motor2_neg 9
#define motor_en A2
void setup()
{
Serial.BEGIN(57600);
setupMotor();
}
void loop()
{
robotForward(200);
robotLeft(200);
robotBackward(200);
robotRight(200);
robotStop(500);
}
void setupMotor() {
pinMode(motor1_pos,OUTPUT);
pinMode(motor1_neg,OUTPUT);
pinMode(motor2_pos,OUTPUT);
pinMode(motor2_neg,OUTPUT);
pinMode(motor_en,OUTPUT);
enableMotor();
robotStop(50);
}
//-----------------------------------------------------------------------------------------------------
motor
//-----------------------------------------------------------------------------------------------------
void enableMotor() {
Slå på motorn förarens chip: L293D
digitalWrite (motor_en, hög);
}
void disableMotor() {
Stäng av motorn förarens chip: L293D
digitalWrite (motor_en, låg);
}
void robotStop (int ms) {
digitalWrite (motor1_pos, låg);
digitalWrite (motor1_neg, låg);
digitalWrite (motor2_pos, låg);
digitalWrite (motor2_neg, låg);
Delay(MS);
}
void robotForward (int ms) {
digitalWrite (motor1_pos, hög);
digitalWrite (motor1_neg, låg);
digitalWrite (motor2_pos, hög);
digitalWrite (motor2_neg, låg);
Delay(MS);
}
void robotBackward (int ms) {
digitalWrite (motor1_pos, låg);
digitalWrite (motor1_neg, hög);
digitalWrite (motor2_pos, låg);
digitalWrite (motor2_neg, hög);
Delay(MS);
}
void robotRight (int ms) {
digitalWrite (motor1_pos, låg);
digitalWrite (motor1_neg, hög);
digitalWrite (motor2_pos, hög);
digitalWrite (motor2_neg, låg);
Delay(MS);
}
void robotLeft (int ms) {
digitalWrite (motor1_pos, hög);
digitalWrite (motor1_neg, låg);
digitalWrite (motor2_pos, låg);
digitalWrite (motor2_neg, hög);
Delay(MS);
}
< br >

Hur man styr Servo motorer med en Arduino

Hur man programmerar en servo med arduino

Hur man gränssnitt LCD med Arduino
Hur man spara ström med Arduino

Hur man kontrollerar 3 servomotorer med tryckknapp växlar och en Arduino Uno

Hur man bygger en luftgitarr med Arduino, aka AIRduino gitarr

Hur man styr 8 lysdioder med arduino uno
Hur man styr en elektromagnet med en Arduino

Hur man gör slem med tandkräm och lim

Hur man gör eld med bara ett batteri och stålull

Hur man startar en brand med en magnesium flinta

Hur man gör Mario med Push Pins

Hur man gör musik med hjälp av ett glas vin

Hur man gör Spaghetti med citron peppar Marinara sås

Hur man binda RC flygplan med en 2 kanal sändare

Hur man gör chatt med befalla snabb (cmd)

Hur man gör matrisen med anteckningar
Hur man subtrahera bråk med till skillnad från nämnare
