Installera och konfigurera SilentStepStick i RAMPER - TMC2100 Schrittmotortreiber (3 / 5 steg)
Steg 3: Förbereda MARLIN (firmware) för din SilentStepSticks


Byta motor riktning i firmware
Om du använder gemensamma måste A4988 StepSticks som jag gör du invertera riktning mot din motors.
Detta kan göras i firmware genom att ändra "false" till "true" för varje område du installera SilentStepSticks på.
Ändringarna görs i Configuration.h - Hit CTRL + F och Sök efter INVERT_X_DIR - de / / sant för SilentSteppers är bara min kommentar för att komma ihåg varför jag gjorde förändringen.
maskin
Invertera stepper riktning. Ändra (eller vända motor kontakten) om en axel går på fel sätt.
Sant för SilentSteppers
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR falskt
Ändra steg pr mm i firmware
Nu gör CTRL + F sak och hitta DEFAULT_AXIS_STEPS_PER_UNIT
Du kanske har något sånt här (standard) där varje nummer är representativt för X, Y, Z och Extruder.
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,4000,500}
Om du körde din motors på 1/16 microstepping innan - om alla 3 tröjor var på, behöver du inte ändra något.
Om du körde dem på 1/8 måste du att fördubbla antalet för den respektive motorer.
Det är en bra idé att kopiera de gamla värdena - bara kopiera rad, placera den över den andra linjen och placera två / / framför den - du kan även göra en kommentar att komma ihåg, som så:
Min ursprungliga värden
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,4000,500}
Detta sätt kan du komma ihåg vad din ursprungliga stammen var.
Ändra riktning för motorer
Om du inte gjorde detta allready, måste du ändra riktning på motorerna.
Här jag har ändrat det för X och Y och gjorde en kommentar att komma ihåg varför jag gjorde det.
maskin
Invertera stepper riktning. Ändra (eller vända motor kontakten) om en axel går på fel sätt.
Sant för SilentSteppers
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR falskt
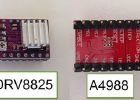
Installera och konfigurera DRV8825 Stepper drivrutiner

Nybörjare guide till installera och konfigurera Octoprint på en Raspberry pi för 3D utskrift

Installation och konfiguration av OpenHAB. Del 6: Sakernas Internet, Home Automation

Installera och konfigurera HADOOP på OsX

Installera och konfigurera en DD-WRT Kong Router

Installera och konfigurera Linux Infrared Remote Control (LIRC) Daemon
Installera och konfigurera KeePass lösenord manager

Hur att installera och konfigurera en trådlös Router

Hur att installera och konfigurera en Iphone

Hur att installera och skräddarsy en Drupal CMS webbplats / / http://www.collectiveresolve.org

Konfigurera Endstops på ramper 1.4 med Marlin firmware - @section homing

Hur att installera och använda en Spinning spö och rulle

Hur att installera och starta Damn Small Linux på en USB Flash Drive

Hur att installera och köra Avast gratis Antivirus 2015 på datorn

King of Kings 3 installera och starta nya spelkonto

Tutorial: Hur att installera och använda MT-kort för att spela 3ds spel på N3DS/XL V4.5-4.1

Hur att installera och använda ScratchExt: Javascript Scratch tillägg

Konstiga bromsar av StrangeCycles: Installation och justering
