IPad att skriva steampunk robot - ROBOLED (1 / 7 steg)
Steg 1: mekanik



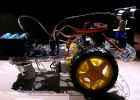
Från början var det mycket tydligt, att en kartesiska robot med x - och y - axel inte skulle se "steampunky" nog och därmed utformningen skulle be om en mer elegant metod, som en faktisk robotarm. Att ha i åtanke att jag skulle ha att konstruera, bygga, kontrollera och avsluta inte bara roboten själv, men också Visa skåpet, beslutade jag att använda så få manöverdon som möjligt. Därför verkade en parallell-kinematiska systemet på en roterande plattformen någorlunda enkel.
En snabb laserskuret kartong prototyp användes för att kontrollera den önskad funktionaliteten och att bestämma rätt dimensioner (avståndet bör täcka hela ytan på iPad, men också den totala storleken av roboten begränsades).
Denna konstruktion gör att roboten – teoretiskt – arbeta i en 3D-rymd, men jag bestämde mig att använda den endast i 2, 5D bemärkelse, som gjorde programmeringen mycket enklare och snabbare (första regeln för effektiv teknik: gör det "tillräckligt bra" istället för "så bra som möjligt").
Funktionerna är följande:
Vrida vänster <> - höger: Base Servo
Förlängning/avtalsslutande: vända både arm-servon i motsatta riktningar (vilket betyder faktiskt skicka samma signal till både servon på grund av deras speglade läggning – med undantag för trimning värden, men mer om det lite senare)
Detta bör – i teorin – göra spetsen av robot arm flytten parallell iPads yta.
Skriva: vrida både arm-servon i samma riktning
[skizze der Drehrichtungen]

Anpassade omvandlingsbara Steampunk Robot återvunnet actionfigur
YourDuino: Grundläggande Arduino-kompatibel att undvika kollision Robot

DIY T-shirt Avskärma att skriva ut

Ändra Canon Pixma skrivare att skriva ut på CD / DVD-skivor

DIY avskärmer att skriva ut på trä glasunderlägg för bröllopsgåva

Hur du uppdaterar din blogg när du inte har tid att skriva

Använd batch att skriva ut ett katalogträd av en måldator

Lätt avsöka dig själv med en Kinect att skriva ut en 3d statyett

Mastering 10 fingrar att skriva / Touch Typing

Använda 3D-skrivare att skriva ut inhägnad för pcDuino 3

Konvertera en bläckstråleskrivare för att skriva ut PCB

Elektron, ett innovativt sätt att skriva med ljus

Att skriva av döda - kostym.
StencilPro - PhotoEZ: DIY avskärmer att skriva ut hemma

Silk avskärmer att skriva ut med slaktare papper

Hur du lär dig att skriva rätt räckte

Hur att skriva konkret poesi
Schmidt: Stratigies för att skriva en impromtu på en bok du inte läste
