Kontroll peristaltiska pumpen med TA7291P och en Arduino (1 / 7 steg)
Steg 1: bakgrund
Om du redan vet allt det här eller bara inte vård, vänligen gå till nästa avsnitt.
För de andra...
Tillbaka EMF : när du plötsligt slutar den ström som passerar i en magnetventil (relä, motor, pump, elektromagnet, induktor, aka något med en spiral tråd i det), magnetfältet kommer att kollapsa och skapa ett motsättande nuvarande (väg åt fel håll) med en spänning som är många gånger den ursprungliga spänningen. Detta kommer sannolikt att steka någon IC trots mycket kort löptid i spänning insamling.
Som en allmän regel, aldrig direkt ansluta någon krets till någon induktiv belastning utan någon form av skydd från baksidan EMF. Du kan hitta en mycket detaljerad förklaring här.
Svänghjul diod: En av tekniken för att undvika skador orsakade av baksidan EMF är att använda en svänghjul diod som kommer att avleda pulsen från KI (tillbaka till spolen faktiskt).
Du kan emellertid inte använda svänghjul dioden med en peristaltiska pumpen som någon skulle behöva vända diod beroende om pumpen används i normal eller omvänd pumpning.
Du kan förmodligen använda en MOV (metall-Oxyde Varistor) istället för svänghjul dioden, men för att berätta sanningen för dig, jag har inte någon att testa och jag bara tänkt på det efter att ha börjat skriva detta...
Om jag kan få några av dem, jag ska göra några tester och efter och uppdatera. Om du har några, prova det och dela dina resultat!
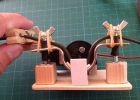
Peristaltiska pumpen: Fungerar som tarmen, klämma ett rör för att få saker. Men till skillnad från tarmen fungerar de flesta av dem helt enkelt i omvänd ordning när du polvändning (Invertera positiva och negativa anslutningen på pumpen), så du kan fylla eller tömma ett fartyg med samma pumpen. Kontrollera alltid vad som kännetecknar dina grejer innan du kopplar in det (helst innan du köper den!). Dessutom några pump kan eller inte kan förstöras av "torra pumpar" (som används för att pumpa en tom röret).
Strömförbrukning: Kallas även tillslag nuvarande, påslagen surge, etc. Detta är den andra anledningen varför du vill använda en PWM-baserade kontroll för din pump. Varje elektrisk motor gillar inte två saker: start och stopp. När de gör det, kommer de att dra en ström som är oftast begränsad till deras (mycket liten) inre motstånd.
Att undvika tillbaka EMF:
Mer plötslig förändring i nuvarande (om du plötsligt "dra ur kontakten"), de mer allvarliga blir ryggen EMF (nu, det finns en gräns för detta, men det är ändå alldeles för hög för din dyrbara IC...)
Hemligheten är att minska/ökar strömmen långsamt.
Och betyder långsamt här några millisekunder, några minuter inte...
Nu, den lätt lösande om du har en Arduino är att använda 2 PWM stift att långsamt öka och minska mängden energi i spolen, därmed undvika tillbaka EMF frågan som vi inte abrupt Bryt strömmen (faktiskt, det finns alltid några tillbaka EMF, men detta sätt är det inom toleranserna som IC). Förresten, detta är ett bra sätt att sätta upp eller ner transformatorer eller laddning superkondensatorer, som dessa små saker är törstig för ström och kommer att bete sig som kortslutning. Detta är dock en helt annan historia (och Instructable). Jag bara kastar det här för att kittla ditt intellekt.
Jag startar nu, inte förklara hur allt som PWM saker fungerar, så några bra tutorials redan väntar på dig.

Kontroll hem apparater med telefon och Internet saker under 6 $
Kul med LED och POT - Arduino insikter

MaxBotix Lv-EZ sensor med Cylonjs och Edison Arduino breakout styrelsen

Gest kontroll car(robot) med Arduino och Android(bluetooth)

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO

LED kontroll med hjälp av Arduino Bluetooth och Android. (Del 1)

Kontroll RGB LED med arduino och bearbetning.
Servo drivs peristaltiska pumpen styrs av Arduino

Arduino Real Time klocka med Alarm och miljö-sensorer

Styra en arduino projekt genom en anpassningsbar android / Iphone app med Blynk och Wemos D1: 2016 SUPER NOOB VÄNLIGT sätt

Super Spooky onda LED ögon av Doom med atTiny85 och Arduino IDE

Projektor IR-kontroll med hjälp av Arduino Uno

Nybörjarguide till att bygga Arduino robotar med Bluetooth och Android

Styra din Robot med en Wii Nunchuck (och en Arduino)

Bygga din egen pratar Tom leksak med skrapa och Arduino

Arduino Uno och Visuino: kontrollera Smart Car Robot med Joystick och L298N motorn förarens

Arduino Mega GPS med LCD och SD loggning
Online grafer med ingenting men en Arduino, Ethernet Shield och Sensor
