Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin (4 / 5 steg)
Steg 4: Ange den maximala strömmen

För att förhindra skador på föraren chip, använder den kretsar för att begränsa den maximala ström som kan användas. Detta ställs via reglermotståndet i styrelsen, i samarbete med några av de andra komponenterna, känsla motstånden (S1 och S2) och motstånd (R1). Eftersom olika drivrutiner kan ha olika komponenter (särskilt generiska kinesisk import) sitt bästa för att kontrollera dessa värden innan du fortsätter.
För min stepsticks S1 och S2 är markerade "R10" och R1 är märkt 303 (skriftligen mycket små!). Dessa motsvarar 0.1 Ohm för S1 och S2 och 30kOhm för R1. Trimpot bör vara 10kOhm
Enligt A4998 ger datablad, och ersätta dessa värderingar,
VREF max = (TrimpotMaxR/(TrimpotMaXR+R1)) x VDD = (10 000 / (10 000 + 30 000)) * 5 = 1.25V
ITripMAX (effektivt max motor ström) = VREF / (8 x Sense_resistor) = 1,25 / (8 * 0,1) = 1.5625A
Att beräkna ampere från uppmätta VREF: A = VREF / 0.8
Att beräkna VREF krävs för en nuvarande mål: VREF = A * 0,8
Som min stegmotorer 2.0a, jag kan inte få maximal ström från drivrutinen, men om jag kör dem på 70% (2.0a x 70% = 1.4a) vill jag en VREF av 1.4a x 0,8 = 1.12V, plus köra dem på 70% kommer att minska temperaturen i nummerlistan.
Jag börjar med trim potten vände moturs, och mäta spänningen med min multimeter mellan logik Gnd stift och centrum av trimpot, långsamt vrida den fram till jag få strax under 1.12V
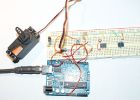
När det är gjort, kan du ansluta strömförsörjningen Motor (12V). Förhoppningsvis kommer att din motor börja köra!
Om inte, koppla ur motorn och kontrollera alla anslutningar med en multimeter. Alltid koppla motoreffekt först, sedan Arduino ur innan du kopplar motorn
Varning: Ansluter eller kopplar från en stegmotor
medan föraren drivs kan förstöra föraren. (Mer allmänt omkoppling något medan den drivs be om problem.)

Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino
Kontrollera en RC servomotor med en Arduino och två momentan växlar

Bi Polar Stepper Motor med L293D och Arduino

Hur använder gamla Stepper Motors med Arduino och A4988 Driver
Styra en motor med en tablett och en Arduino Uno

Kör en Stepper Motor med en AVR mikroprocessor
Kör en unipolär Stepper Motor med en bipolär drivrutin

Hur man kör en DC Motor med Transistor - Arduino handledning

Att göra en hypnotisk disk med en Arduino och små DC motor.

Hur man styr Servo motorer med en Arduino

Styra en kamera med en Arduino och RS232 sköld

Motion Tracker med PIRs, Arduino och en Servo

Väderstation med SAMIIO, Arduino och Raspberry Pi
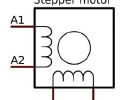
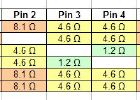
Hur man hittar stepper motor rullar lätt och snabb

D.D.Tap - interaktiva spel plattform med bearbetning, Arduino och Twitter

Göra en bärbara streckkodsläsare med en arduino och en cuecat

Hur man mäter temperaturen mycket noggrant med en Arduino och en TSYS01 temperatur Sensor styrelse.

Med en matrisskrivare LED med en Arduino och SKIFT registrera
