Motion Tracker med PIRs, Arduino och en Servo


Det är ett enkelt sätt att ge intryck av att huvudet (birdy) faktiskt följer rörelsen.
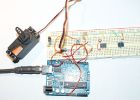
Det är mycket lätt att bygga men lite tidskrävande att göra kabelnätet som ansluter PIRs till Arduino. Jag helt enkelt tråd PIRs positiva och negativa ledningar tillsammans och stänga dem direkt av Arduino 5 voltskrets, koppla signal kablar till Arduino digitala portar 3,4,5 och 6, Anslut servo också till 5 volt och marken hamnar och det är signal till 9 porten och kör mitt program som också är ganska enkel.
Programmet går igenom varje PIR ingång via en matris och om PIR går högt sedan flyttar servo till att PIR motsvarande servo position. Jag var tvungen att lägga till en annan array för att spåra varje PIR och bara att det kan användas en gång per hög eller annat det ibland skulle hoppa mellan intilliggande PIR servo positioner - en definitivt lik en fågel rörelse men inte alltför önskvärt.
Detta skulle vara en stor Halloween mekanism till spår rörelse med ett huvud.
Detta är det första projektet jag någonsin använt med en Arduino ombord och jag blev förvånad över hur lätt det är att använda. Det tog bara några minuter att installera programvaran och kör programmet LED blinkar. Hoppas på att använda den för fler projekt i framtiden.
PIRs bör ha kortast möjliga fördröjningstiden. Den minsta fördröjningen på denna särskilda PIR är 2,5 sekunder vilket är hur länge du måste vänta på PIR att gå lågt innan den kan upptäcka nya rörelsen. Lite dyrare PIRs är förmodligen snabbare men 2,5 sekunder är ok. Längre tid PIRs gör för en mer frustrerande prestanda.
Mer PIRs skulle också göra för en mer realisitic rörelse av huvudet. Också, en kunde bromsa rörelsen mellan PIR positioner för mer realistisk rörelse genom att införliva en försening subrutin men jag gillar den snabbare rörelsen själv. Med mer PIRs är skulle inte vara fullt så ryckigt ändå.
Kontrollera en RC servomotor med en Arduino och två momentan växlar

Hur man gör en GSM läge Tracker med AdaFruit FONA och Arduino

Sakernas Internet WiFi DIY rörelsedetektor med e-postavisering med PIR-sensor och ESP8266

Manipit - IRONMAN JARVIS-liknande Hand Motion Tracking med målade handskar

D.D.Tap - interaktiva spel plattform med bearbetning, Arduino och Twitter

ZAPpelin, eller hur du tränar din luftskepp med en Arduino och IR-fjärrkontroll

Styra en kamera med en Arduino och RS232 sköld

Väderstation med SAMIIO, Arduino och Raspberry Pi

Göra en bärbara streckkodsläsare med en arduino och en cuecat

Hur man mäter temperaturen mycket noggrant med en Arduino och en TSYS01 temperatur Sensor styrelse.

Med en matrisskrivare LED med en Arduino och SKIFT registrera

Att göra en hypnotisk disk med en Arduino och små DC motor.

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Lätt Stop-Motion docka med Sugru ansikte och händer

Styra två lysdioder med en Arduino och bitVoicer

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde
Multiplexering 7 Segment visar med Arduino och SKIFT register

Kör motorn med android använder arduino och bluetooth
