Motion Tracker med PIRs, Arduino och en Servo (4 / 4 steg)
Steg 4: Ladda upp program

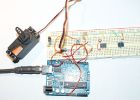
Jag ursprungligen ställa upp för 5 PIRs men ledningar selar var dålig så snarare än att dra sönder hela konstruktionen och fixa det jag gick med bara 4 PIRs.
Programmet gör två andra saker. Om den en PIR är hög och servo är redan på att PIRs motsvarande position, inte flytta den.
Dessutom använder jag en annan array för att spåra om PIR har använts eftersom den gick hög. Jag tillåter endast att användas en gång för varje hög stat. Om du inte gör att du få läggas mellan intilliggande PIRs som inte är nödvändiga.
Jag slå bara på lampan när en PIR är hög så jag kan berätta genom att titta på Arduino om det finns någon aktivitet i PIRs.
#include < Servo.h >
författare: jim demello feb 2014 / /
booleska pirStatus;
Servo servo1;
int servangle = 0; servo vinkel variabel
int pirNo [] = {3,4,5,6,7}. PIR pin-koder
int pirPrevLow [] = {1,1,1,1,1}. tidigare låg flagga värdet true
int pirPrevUsed [] = {0,0,0,0,0}. pir å använts innan låg
int pirPos [] = {10,60,100,140,170}. positioner för servo (0-180)
int curPosPir = 0;
int pirPin = 3;
int ledPin = 13.
void setup() {
Serial.BEGIN(9600);
servo1.attach(9);
för (int jag = 0; jag < 4; i ++) {
pinMode (pirNo [i], ingång);
}
pinMode (ledPin, produktionen);
Delay(10000); kalibrera för ca 10 sekunder
servo1.write(90); sätta servo vid center för att börja
}
////////////////////////////
HUVUDLOOP
//////////////////
void loop() {
för (int j = 0; j < 4; j ++) {/ / för varje PIR
pirPin = pirNo [j];
pirStatus = digitalRead(pirPin);
om (pirStatus == hög) {
digitalWrite (ledPin, hög); den ledde visualiserar sensorer utdata pin staten
IF(pirPrevLow[j]) {
om (curPosPir! = pirPin & & pirPrevUsed [j] == 0) {/ / om hög PIR är annorlunda än nuvarande position PIR då flytta till ny position
servo1.write(pirPos[j]);
Serial.println(j);
Delay(50);
curPosPir = pirPin; behålla nuvarande PIR
pirPrevUsed [j] = 1;
}
pirPrevLow [j] = 0; PIR är nu inte låg
}
}
annat {
digitalWrite (ledPin, låg); den ledde visualiserar sensorer utdata pin staten
pirPrevLow [j] = 1; PIR är nu låg
pirPrevUsed [j] = 0;
}
} / / end j antal pirs loop
} / / end oändlig loop
Kontrollera en RC servomotor med en Arduino och två momentan växlar

Hur man gör en GSM läge Tracker med AdaFruit FONA och Arduino

Sakernas Internet WiFi DIY rörelsedetektor med e-postavisering med PIR-sensor och ESP8266

Manipit - IRONMAN JARVIS-liknande Hand Motion Tracking med målade handskar

D.D.Tap - interaktiva spel plattform med bearbetning, Arduino och Twitter

ZAPpelin, eller hur du tränar din luftskepp med en Arduino och IR-fjärrkontroll

Styra en kamera med en Arduino och RS232 sköld

Väderstation med SAMIIO, Arduino och Raspberry Pi

Göra en bärbara streckkodsläsare med en arduino och en cuecat

Hur man mäter temperaturen mycket noggrant med en Arduino och en TSYS01 temperatur Sensor styrelse.

Med en matrisskrivare LED med en Arduino och SKIFT registrera

Att göra en hypnotisk disk med en Arduino och små DC motor.

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Lätt Stop-Motion docka med Sugru ansikte och händer

Styra två lysdioder med en Arduino och bitVoicer

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde
Multiplexering 7 Segment visar med Arduino och SKIFT register

Kör motorn med android använder arduino och bluetooth
