Låg kostnad modulära Neuroprosthetic (4 / 8 steg)
Steg 4: kod
Behandling programmet nämnde tidigare funktioner som beskrivs och är byggd på den redan angivna öppen BCI bearbetning Master. Det ser för indikationer jag har redan bestämt korrelerar till rörelse, och skickar det önskat kommandot. Eftersom jag hade kört tester på mig själv och armen för att mäta graden av flex i lederna, och beräkna en procent fel. Programmet skriver värden till en txt-fil och sedan ett annat program läser dessa värden och skickar seriell kommandon på armen. Jag har arbetat på en app att styra armen så att användaren kan växla fram och tillbaka mellan en levande datan strömmer och anpassad kontroll, men är inte klar ännu. Jag kommer att ladda de aktuella filerna. Också, jag sa i föregående avsnitt, dessa är fortfarande ett pågående arbete och kräver omfattande förbättring. Detta är koden i sitt nuvarande tillstånd, och jag kommer fortsätta att uppdatera den när jag förbättra den. Jag kommer också lägga upp Arduino koden för den andra prototypen.

Tacuino: en låg kostnad, modulära, Arduino-kompatibel pedagogiska plattform

Organisera din verkstad med låg kostnad modulära hyllor (AKA franska Cleat).

L298N motorn förarens styrkort

Fido, var är du? -eCOLLAR

Bygga en Solar Powered ESP8266

DIY $10 IoT baserade Home Automation

Komposten Bin - låg kostnad, lätt och modulära
2.4 G M2M RF UART modul Debugger Användarhandbok

3V PIR rörelsesensor kör en (defekta) 3v relä modul

Korrekt flytande nivå Controller med låg kostnad sensor och TV: ns fjärrkontroll för inställningar

Hur man bygger ett modulärt fyra hylla inomhus växthus

Flera LED-Display modul

Tetris-inspirerade modulära lampa

Grundläggande flera modulära ramar för last cyklar - stapelbar vattentäta laser skär rutor

3D tryckt, ultralätt, 3-axlig modulära Time-Lapse Motion Control System

$10 Arduino WiFi rörelsedetektor (PIR) som skriver att SQL via billigt ESP8266 modul
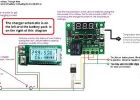
Modulär och billiga litium batteri laddare System - kan göras på några minuter!

DIY LED-tecken med MAX7219 Dot Matrix modul STM8S003F3 MCU för AVR PIC MSP430 Arduino ARM STM32
