Lätt bygga min egen användbara Robot för mindre än $100 (2 / 3 steg)
Steg 2: Skriv ut och montera


När du har elektronik, mekanik, mögel, programvara, låt oss montera roboten!
3.1. elektronik
3.1.1. huvudsakliga system
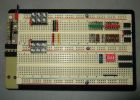
Vara redo att löda stift och montera element att det set av brödunderläggen! Du behöver extern ström källa spänning på 12 volt, som ger minst 1 Ampere. Kraftledning är skyddad av en säkring med nominellt värde av 2 Ampere.
DC-DC omvandlare D1 och D2 ordna två kanaler av spänning. D1 är för Arduino Nano D3 och Bluetooth modul D4, D2 är för båda servon. Använda voltmeter justera konverterare så att D1 ger utgång spänning 5V, D2 ger utdata spänning 7V.
Modul Bluetooth D4 par din smartphone och roboten. Vi använder UART gränssnitt att tillhandahålla data exchange mellan Microcontroller D3 och Bluetooth-modulen D4, se RX och TX. Arduino Nano D3 kontroller servon med utgångar D5 och D6, genom motstånden R2 och R3. Se byglarna JMP1 och JMP2. För normal funktion i elektronik JMP1 och JMP2 måste vara installerat. Innan du lägger upp nya firmware på mikrokontroller D3, ta bort JMP1 och JMP2.
Om du har erfarenhet hur man löda element på PCB, gör det själv enligt det huvudsakliga systemet. Annars montera elektronik på skärbräda med hjälp av tabell "Element på brödunderläggen (SB DIY)". Vara mycket uppmärksam med alla siffror och bokstäver!
3.2. mögel
Använd 3D-skrivare att skriva ut mögel.
3.2.1. Hämta SelfieBot mögel STL-filer på: https://pinshape.com/items/22311-3d-printed-selfi... eller https://pinshape.com/items/22311-3d-printed-selfi...
3.2.2. Använd Cura (Hämta Cura) för att omvandla SelfieBot mögel STL-filer till GCode för 3D-utskrifter.
3.2.3 Starta Cura app. och öppna hämtade STL filer en efter en att trycka på knappen Ladda i det övre vänstra hörnet av modellen Visa fönstret tills du fyller det utskrivna området.
3.2.4. du kan använda din vanliga 3D skrivarinställningar för SelfieBot mögel utskrift. Föredrog utskriftsinställningar för Wanhao dupliceringsapparat i3 med munstycke 0.3 mm med PLA plast i Cura är:
Kvalitet: Lager höjd (mm) - 0.2 Shell tjocklek (mm) - 0.9 returgående fas är aktiverat
Fyllning: Botten/topp tjocklek (mm) - 1 borsttäthet (%) - 20-35 (denna värden är vanliga)
Hastighet och temperatur: utskriftshastighet (mm/s) - 30 utskrift temperatur (C) - 210
Support: Support typ - röra buildplate vidhäftning plattformstyp - flotte
Fillament: Diametr (mm) - 1,75 flöde (%) - 100,0
Returgående fas: Hastighet (mm/s) - 40,0 avstånd (mm) - 1,5
Med dessa rekommenderade inställningar behöver du ca 400-450 gram PLA plast om det skulle bli någon oveprints vid utskrift process skador.
3.2.5 i en meny fil trycker du på "Spara GCode..." på en flash-minne anordning compatipble till skrivaren 3D (microSD flash minneskort till exempel).
3.2.6 infoga flash-minneskortet i din 3D-skrivare och skriva ut filer enligt dina 3D-skrivare instruktioner.
3.3 montering.
Så har du detaljer (se bilden ovan):
NB: Servo motoraxeln mössor, ramar och fästet är metal.
Viktigt! När elektronik är redo, ansluta servo motors pllugs till den och vända SelfieBot på att koppla den för att förse befogenhet att fastställa den servomotorer i en nollposition. Sedan stänga av och koppla bort servo motors pluggarna.
3.3.1. förbereda skruvmejsel för Pozidriv, pincett och tång.
3.3.2. Förbered 26 screwnuts 3 mm diameter och 7 screwnuts 4 mm i diameter.
3.3.3. Förbered försänkt insex 3 mm diameter: 10 mm - 8 St. 16 mm - 8 St. runda insex 3 mm diameter: 8 mm - 2 st. 16 mm - 6 st. 20 mm - 10 St. försänkt skruv 4 mm diameter: 25 mm - 6 st. (du kan behöva mer skruvar - det är upp till dig).
3.3.4. skruv del #1 med del #2 med hjälp av två 4 mm diameter skruvar och två screwnuts.
3.3.5. Skruva fast delarna #1 och #2 med del #3 med minst fyra scwews och screwnuts 3 mm diameter.
3.3.6. Skruva fast ramen för en servomotor med hjälp av två skruvar och screwnuts 3 mm diameter.
3.3.7. Skruva servomotor med en ram med sin axel till upp i mitten av en rund del #3. Var noga med servo sladden ligger i låg kupé.
3.3.8. Montera runda locket på servo motoraxeln och skruva med en 3 mm diameter skruv.
3.3.9. montera del #4 med en andra ram för en servomotor på den.
3.3.10. Skruva fast runda locket av servomotor #1 med fyra försänkta skruvar genom andra ramen.
3.3.11. sätta andra servo motor sladden till det låga facket och skruva på ramen.
3.3.12. skruv 3 mm diameter runt skruv genom 4 mm diameter screwnut på ramen på servo motoraxeln nivå från andra sidan.
3.3.13. Montera servo motoraxeln locket och sedan montera fästet på axeln från den ena sidan och på 3mm skruven med 4 mm screwnut från den andra.
3.3.14. Skruva fast fästet till servo motoraxeln cap.
3.3.15. Montera #5 delar från båda sidor av fästet och skruva.
4. Montera elektronik och ansluta servomotorer till den. Slå på. Testa elektronik och servon via SelfieBot Droid program på din smartphone.
5. Skruva fast botten #6 med 4 mm diameter skruvar och screwnuts.
6. montera del #7.
7. Använd någon gemensam mobil enhet vagga. Om du vill använda en magnet hållare, du behöver en Magnet vagga innehavaren del bifogas alla STL-filer för 3D utskrift på länkar https://pinshape.com/items/22311-3d-printed-selfi... eller https://pinshape.com/items/22311-3d-printed-selfi...
Ser bra ut, är det inte? Bra jobbat!

Hur man knyter min mest användbara Cobra Stitch form: The Bunny Loop

BYGG DIN EGEN ROBOT. DIY
Bygga din egen elektrisk motorcykel

Bygg din egen CNC-maskin.

Konstruera och bygga din egen hålkamera

Bygga din egen bärbara Bitcoin gruvdrift rigg / Battlestation

Nybörjarguide till OpenGL: Bygg din egen CAD-program

Bygga din egen Wifi-radion

Bygga din egen Djembe (och End tabell)

Bygga din egen compactus

Bygg din egen högtalare från grunden!

Remix: Bygg din egen 555

Bygga din egen kran

Använda en dammsugare för att bygga din egen Skateboard

Betong räknare med min råd för att bygga din egen spara pengar & gör det för under $30

Är skräp tvättmaskin verkligen skräp? Användbara material för cool hem bygger från döda tvättmaskin.
Min topp tio mest användbara bakbord Tips och Tricks

LEGO användbara bygger II
