Lätt bygga min egen användbara Robot för mindre än $100 (1 / 3 steg)
Steg 1: Bekantskap med delar av roboten


Först och främst låt oss få acquantied med delar av roboten: elektronik, mekanik, mögel, programvara.
2.1. elektronik
2.1.1. strukturlista (BOM)
För att göra roboten själv behöver du:
-USB Nano V3.0 ATmega328 16 M 5V Microcontroller CH340G ombord för Arduino = 1 st
-Trådlös seriell 4 Pin Bluetooth RF Transceiver modul HC-06 slav för Arduino DH = 1 st
-DC-DC omvandlare. LM2596 steg ner Module DC-DC Buck Converter leverera uteffekt 1.3V-35V = 2 st
-MG996R vridmoment Digital alla Metal Gear Servo för helikopter bil båtmodell vara = 2 st
-Säkring, 2 A, 250 V = 1 st (jag rekommenderar för att köpa + 1 st för förändring)
-Motstånd, 0,5 Wt, 100 OHM = 3 st
-CONN JUMPER kortslutning, 2.54х8.5mm, 2 kontakter = 2 st
-Power jack på styrelsen, 2,1 mm, 16V / 1.5a = 1 st
-AC Adapter Power Supply DC12V 1-2 a, Anslut 5.5х2.1 = 1 st
för dem som har lite erfarenhet av lödning:
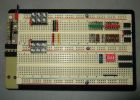
-A1) Prototyping Experimental 400 kontakt hål Lödfritt set av brödunderläggen Test plattan = 2 st
för dem som kan löda PCB:
-A2) Prototyping PCB Universal ombord 70х90 sided glas Fiber Prototyping PCB Universal ombord = 1 st
-1 x 40Pin 40p manliga IC singel ror platt huvud Socket 2,54 mm PLS-40 Panel = 10st
-Heta flexibla 30AWG strandsatta UL1007 Wire kabel sladd Hook-up DIY elektrisk. yttre diameter > 1,5 mm, inre diameter > 0,5 mm. Minimal längd är 100 mm.
2.1.2. funktionalitet
Mikrokontroller förvandlas enheten till smart robot. Mikrokontroller fattar beslut enligt med programmets algoritm. Som för mikrokontroller styrelse valde vi Arduino Nano. Det är en liten, komplett och skärbräda-vänlig styrelsen baserat på ATmega328. Bluetooth-modulen ansvarar för ihopkoppling smartphone och roboten. Det ger kommunikation. Strömförsörjning. I grund och botten använder vi makt nätdel: 12V (SelfieBot Base DIY). Om du behöver autonoma användning av roboten, Använd batterier: 2st 3, 7V. Två DC-DC omvandlare ansvarar för stabil spänning ström av elektroniska beståndsdelar.
2.2. mögel
Mögel är gjord av plast PLA. Vi ut det med 3D-skrivare WanHao dupliceringsapparat i3. Vi erbjuder dig flera komplett 3D-modeller, men du kan skapa egna formen av din robot.
2.3. mekanik
För att göra mobil robot använder vi mekanik. Den består av servon och metall kopplingar. Servon. Vi har valt digital Servo TowerPro MG996r för sin låga pris och tillräckliga egenskaper. Servo tar emot digitala signaler från mikrokontroller. Vi rekommenderar plast redskap att minska buller. Också kan du prova stegmotorer med kodare, med egenskaper inte värre än Servo TowerPro MG996r.
2.4. mjukvara
2.4.1. firmware
Ladda ner firmware på www.endurancerobots.com (-> DIY SelfieBot webbsida på botten av robotar) och ladda upp den till mikrokontroller. Ladda ner Arduino program på www.endurancerobots.com
2.4.2. kommer ansökan
I juni 2016 har vi bara Android-kompatibelt program: "Droid". Hämta Droid på www.endurancerobots.com (längst ner på robotar -> DIY SelfieBot webbsida).

Hur man knyter min mest användbara Cobra Stitch form: The Bunny Loop

BYGG DIN EGEN ROBOT. DIY
Bygga din egen elektrisk motorcykel

Bygg din egen CNC-maskin.

Konstruera och bygga din egen hålkamera

Bygga din egen bärbara Bitcoin gruvdrift rigg / Battlestation

Nybörjarguide till OpenGL: Bygg din egen CAD-program

Bygga din egen Wifi-radion

Bygga din egen Djembe (och End tabell)

Bygga din egen compactus

Bygg din egen högtalare från grunden!

Remix: Bygg din egen 555

Bygga din egen kran

Använda en dammsugare för att bygga din egen Skateboard

Betong räknare med min råd för att bygga din egen spara pengar & gör det för under $30

Är skräp tvättmaskin verkligen skräp? Användbara material för cool hem bygger från döda tvättmaskin.
Min topp tio mest användbara bakbord Tips och Tricks

LEGO användbara bygger II
