Lufta pressar Rocket Launcher System (9 / 10 steg)
Steg 9: Elektronik

För att styra hela systemet använde vi Teensy 3.1. Det är en kraftfull mikrokontroller med ARM-processor och det är Arduino kompatibel.
Power System
För att driva all elektronik använt vi 3 celler LiPo batteri. Du bör använda mest kraftfulla batteriet du kan hitta (och passar din budget). De mer ampere du har mer tid när systemet drivs på.
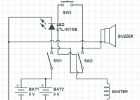
Systemet elektroniken Använd 5v för Teensy och 12v för nödsänkningssolenoiden och motorerna.
Vi använder spänningsregulator till få 5v utgång och lade till två 100uF kondensatorer till indata och utdata för att minska buller.
Se till att lägga till kylflänsen till det eftersom det kan bli mycket het.
Tryckgivare
Sensorn ASDXACX100PAAA5 typ är absolut vilket ger oss analog utgång i förhållande till noll. Om vi prova det i öppen miljö vi bör läsa omkring 14.7 psi (1 ATM). Detta är ett bra sätt att se till att vi kopplade det korrekt och översätta analog utgång till psi värden.
Sedan Teensy fungerar i 3.3V och sensorn är 5v använde vi två resistorer 10 K och 20 K som spänningsdelare.
Vi har även lagt till 220nF kondensator för att minska bullret i behandlingen.
Sensorn är ansluten till stift A5 på det teensy.
Vindmätaren
Vindmätaren är en enkel hall sensor som gör en puls när en magnet passerar nära honom.
Vi fäster ett avbrott till stift 4 för varje ändring i tillståndet pin (falla eller att höja) och räkna hur många avbryter vi fick i en sekund.
Hall sensorn behöver pull-up resistor så 2.4 K resistor är ansluten mellan signalen och en 5v.
Magnetventil
Nödsänkningssolenoiden är en enkel elektrisk ventil som öppnar vid tillämpning av makt. För att öppna den kopplade vi det till relä direkt till batteriet. Reläet ansluten till Teensy styrelsen genom transistorn att undvika överbelastning Teensy PIN-koden (som inte kan ge för många ampere). Reläet ansluten till stift 8.
Stegmotor
Motorn är kopplad till off hyllan föraren. Föraren är ansluten till Teensy till stift 2 och 3 för riktning och steg. Mer om det i programvara steg.
Hastighetsmätare
De två lasrarna hastighetsmätarens ansluten till 12v via 820 ohm. Phototransistors ansluten till Teensy stift 21 och 22 med pull-up motstånd (1.2K).
Avståndet mellan phototransistors är 5cm (0,05 meter) att få hastigheten i meter per sekund vi dela upp distansera av den tid det tog den raket passet detta avstånd. Vi mäter tid i mikrosekunder att få mer exakt hastighet läsning.
Kommunikation
Kommunikationen med systemet är trådlös seriell kommunikation med Bluetooth-modul eller XBee.
Vi ansluta modulen till det Teensy RX/TX stift.
Trådlös kommunikation är säkrare, vi kan starta raketen från ett säkert avstånd.

Luft vatten Rocket Launcher!

RC Rocket Launch System

Hur man bygger en läsk flaska Rocket Launcher

Lätt dubbla Bottle Rocket Launcher

Tryckluft Rocket Launcher

Uppladdningsbara Rocket Launcher

Halm Rocket Launcher - V 1,1

Arduino modell Rocket Launcher för 3D tryckt raketer

Pappers-Rocket Launcher med Generator

Många ansikten Sugru Pt. 1 mjölkkanna Rocket Launcher

Air-Powered potatis Rocket Launcher och Ammunition
Handheld rocket launch controller

Hur man bygger en modell Rocket Launch styrenhet med en avtagbar nyckel

Hur man gör mini Rocket Launcher missil Bazooka fast Propellant HD videokvalitet

Model Rocket Launch Controller läggas till Power Tool batteriladdare

K'NEX Rocket Launcher

LEGO Rocket Launcher

Nerf Rocket Launcher Mod