Lufta pressar Rocket Launcher System (10 / 10 steg)
Steg 10: programvara

Programvara källan kan hittas här: https://github.com/romansky/Apollo
- Controller: Teensy kod
- Apollo.py: python version
- CSharp/Apollo: C# version
Registeransvarige
I filen config.h har vi alla konstanterna för projektet (pin-koder, gånger, avstånd, etc.)
För att skriva det Teensy RX/TX stift måste vi använda "Serial1" eftersom "Serial" används av USB-följetongen. Ändra konstanten "HWSERIAL" om du vill felsöka den.
En annan viktig konstant är "PITCH_MOTOR_STEPS_PER_ANGLE", måste du ändra det enligt din motor driver. Den aktuella konfigurationen är 400 steg per 90 grader.
Kommunikationsprotokoll
Controller till PC
AXX - vindmätaren: avbrott per sekund (int)
Pxx - trycksensor: trycket i psi (float)
Sxx - hastighetsmätare: hastighet i m/s (float)
AH - hastighetsmätare första indikator hög
AL - hastighetsmätare första indikator låg
PC till Controller
Rxx - öppna magnetventilen för xx millisekunder (int)
Cxx - kalibrera rigg planen till de nuvarande graderna (float)
Sxx - inställning av riggen tonhöjd (float)
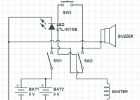
Hastighetsmätare AH och AL indikatorn låter dig veta om fenorna av raket bryter den lägre fototransistor laser eller inte kan du flytta raketen.
Vidareutveckling
Programvaran är för närvarande under utveckling.
Vi planerar att lägga till mer funktionalitet som beräknade avstånd (finns i python version) från trycket, vinkel, vindhastighet och vindriktning (också bygga vind riktning hårdvara).
Att välja mål på kartan och beräkna det nödvändiga trycket och vinkel för att nå målet.
Följ detta instructable och git-förrådet för uppdateringar

Luft vatten Rocket Launcher!

RC Rocket Launch System

Hur man bygger en läsk flaska Rocket Launcher

Lätt dubbla Bottle Rocket Launcher

Tryckluft Rocket Launcher

Uppladdningsbara Rocket Launcher

Halm Rocket Launcher - V 1,1

Arduino modell Rocket Launcher för 3D tryckt raketer

Pappers-Rocket Launcher med Generator

Många ansikten Sugru Pt. 1 mjölkkanna Rocket Launcher

Air-Powered potatis Rocket Launcher och Ammunition
Handheld rocket launch controller

Hur man bygger en modell Rocket Launch styrenhet med en avtagbar nyckel

Hur man gör mini Rocket Launcher missil Bazooka fast Propellant HD videokvalitet

Model Rocket Launch Controller läggas till Power Tool batteriladdare

K'NEX Rocket Launcher

LEGO Rocket Launcher

Nerf Rocket Launcher Mod