Motor Driver med 555 Timer IC (9 / 9 steg)
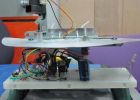
Steg 9: Mest borterst: Bluetooth, kontrolleras av Android-telefon

Se min tidigare bluetooth panzer utan kamera. Den styrs av Android-telefon. Fyra 555 Timer ICs kör dess dubbla dc-motorer. Förvänta dig inte hastigheten :D
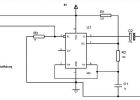
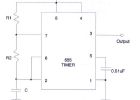
Ansluta till diagrammet ovan och ladda upp denna skiss:
/*
Chienline @ 2014
Kontrollera en Arduino bil/tank med en Android-telefon via Bluetooth-anslutning.
Android-programvara: Arduino Bluetooth RC bil av Andi.Co [i PlayStore].
Vissa koder ändras från officiella koder för att få det fungerar med min DIY Motor Driver.
*/
char dataIn = s '; Karaktär/Data från telefonen. S = stopp;
int LCPin = 2; 555 pinut 5 vänster Motor
int LTPin = 3; 555 pinut 2 vänster Motor
int RCPin = 4; 555 pinut 5 rätt Motor
int RTPin = 5; 555 pinut 2 höger Motor
int pinfrontLights = 6; PIN-kod som aktiverar framför lamporna.
int pinbackLights = 7. PIN-kod som aktiverar tillbaka lamporna.
char avgörande; Används i funktionen check, butiker karaktären fick från telefonen.
röding det; Används i funktionen loop, butiker karaktären fick från telefonen.
int hastighet = 0; Lagrar hastighet baserat på karaktären skickas av telefonen.
void setup()
{
Serial.BEGIN(9600); Initiera seriell kommunikation med Bluetooth-modul på 9600 baud.
pinMode (LCPin, OUTPUT);
pinMode (LTPin, OUTPUT);
pinMode (RCPin, OUTPUT);
pinMode (RTPin, OUTPUT);
pinMode (pinfrontLights, produktionen);
pinMode (pinbackLights, produktionen);
Stoppa båda motorer på makt upp.
stopMotors();
}
void loop()
{
det = check();
medan (det == 'F') //if inkommande data är en F, gå framåt
{
moveForward();
det = check();
}
medan (det == 'B') //if inkommande data är a B, flytta tillbaka
{
moveBackward();
det = check();
}
medan (det == "L") //if inkommande data är en L, flytta hjul till vänster
{
moveLeftForward();
det = check();
}
medan (det == 'R') //if inkommande data är en R, flytta hjul höger
{
moveRightForward();
det = check();
}
medan (det == 'I') //if inkommande data är ett jag, sväng höger fram
{
moveRightForward();
det = check();
}
medan (det == "J") //if inkommande data är en J, vända tillbaka
{
moveRightBackward();
det = check();
}
medan (det == "G") //if inkommande data är ett G, sväng vänster fram
{
moveLeftForward();
det = check();
}
medan (det == "H") //if inkommande data är en H, sväng vänster tillbaka
{
moveLeftBackward();
det = check();
}
medan (det == s ') //if inkommande data är en S, sluta
{
stopMotors();
det = check();
}
Främre lampor och ljus tillbaka på/av är cool, men för att starta har inte koppla dem till min krets.
Men jag lämnar upptäckt i koden för vidare användning.
medan (det == 'U') //if inkommande data är ett U, slå på främre lampor
{
digitalWrite (pinfrontLights, hög);
det = check();
}
medan (det == 'u') //if inkommande data är ett u, stänga av främre lampor
{
digitalWrite (pinfrontLights, låg);
det = check();
}
medan (det == 'W') //if inkommande data är en W, vända tillbaka lampor
{
digitalWrite (pinbackLights, hög);
det = check();
}
medan (det == 'w') //if inkommande data är en w, stänga av tillbaka lampor
{
digitalWrite (pinbackLights, låg);
det = check();
}
}
int check()
{
om (Serial.available() > 0) //Check för data på de seriella linjerna.
{
dataIn = Serial.read(); Få karaktär skickas av telefonen och lagra den i "dataIn".
Serial.println(dataIn); denna linje är för felsökning med hjälp av Arduino seriell monitor.
om (dataIn == "F")
{
Determinant = "F";
}
annars om (dataIn == "B")
{
Determinant = "B";
}
annars om (dataIn == 'L')
{
Determinant = 'L';
}
annars om (dataIn == "R")
{
Determinant = "R";
}
annars om (dataIn == "I")
{
Determinant = "I";
}
annars om (dataIn == "J")
{
Determinant = "J";
}
annars om (dataIn == "G")
{
Determinant = "G";
}
annars om (dataIn == "H")
{
Determinant = 'H';
}
annars om (dataIn == 'S ")
{
Determinant = s ';
}
//-----------------------------
Standard DC motorer är inte tillräckligt snabbt för att spela med hastighet.
Du kan ställa in hastigheten med 555 Trigger Pin med analogWrite();
Jag slår vad om du inte vill göra din tank långsammare än dess högsta hastighet med hjälp av standard DC motorer.
/*-----------------------------
annars om (dataIn == '0') //velocity = 0 - 9, q = toppfart.
{
hastighet = 20; värde = 0 - 255; "velocity" behöver inte återlämnas.
}
-------------------------------*/
annars om (dataIn == "U")
{
Determinant = 'U';
}
annars om (dataIn == "u")
{
Determinant = 'u';
}
annars om (dataIn == "W")
{
Determinant = 'W';
}
annars om (dataIn == "w")
{
Determinant = 'w';
}
}
returnera avgörande;
}
Dessa riktning funktioner är utformade för 555 Motor Driver
Du måste ändra dem för att passa din andra motor förare.
void moveForward() {
digitalWrite (LCPin, hög);
digitalWrite (LTPin, hög); L-Forward
digitalWrite (RCPin, hög);
digitalWrite (RTPin, hög); R-Forward
}
void moveBackward() {
digitalWrite (LCPin, hög);
digitalWrite (LTPin, låg); L-bakåt
digitalWrite (RCPin, hög);
digitalWrite (RTPin, låg); R-bakåt
}
void stopMotors() {
digitalWrite (LCPin, låg);
digitalWrite (LTPin, hög); L-Stop
digitalWrite (RCPin, låg);
digitalWrite (RTPin, hög); R-Stop
}
void moveLeftForward() {
digitalWrite (LCPin, hög);
digitalWrite (LTPin, låg); vänstra hjulet bakåt
digitalWrite (RCPin, hög);
digitalWrite (RTPin, hög); höger hjul fram
}
void moveRightForward() {
digitalWrite (RCPin, hög);
digitalWrite (RTPin, låg); höger hjul bakåt
digitalWrite (LCPin, hög);
digitalWrite (LTPin, hög); vänstra hjulet framåt
}
void moveLeftBackward() {
digitalWrite (LCPin, hög);
digitalWrite (LTPin, hög); vänstra hjulet framåt
digitalWrite (RCPin, hög);
digitalWrite (RTPin, låg); höger hjul bakåt
}
void moveRightBackward() {
digitalWrite (LCPin, hög);
digitalWrite (LTPin, låg); vänstra hjulet bakåt
digitalWrite (RCPin, hög);
digitalWrite (RTPin, hög); höger hjul fram
}

Enkel (och smutsiga) puls bredd modulering (PWM) med 555 Timer
Basic (PWM) varvtal kontroll med 555 Timer ICs
Cirkelträning Diagram av vattennivån larm med 555 Timer

Automatisk vattenkran med 555 timer
Blinkande LED med 555 Timer

Enkla elektroniska Piano med 555 timer i CD-fodralet

Krets planering: Skapa en Dual blinkande LED krets på Protoboard med 555 Timer

Bultande/blekning/blinkande LED med 555 Timer

Blinker med 555 timer

Enkla alternativ LED blinkar med 555 timer

Kusliga ljud med 555 Timer
Astable Multivibrator med 555 Timer

Star Trek Red Alert ljudeffekt (med 555 timer)

Blinkande LED Railroad lampor gjorda med 555 timer

Time Lapse Intervalltimer för systemkameror med 555 timer IC

Automatisk LED night light (med 555 timer)
Väggen efter Robot med 555 Timer

Dubbla Motor Driver med Arduino använder en SN754410NE Quad halv H-bro