Pulserande gubbe detektor (2 / 6 steg)
Steg 2: Bakbord testning


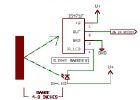
RF-moduler fungerar ganska enkelt. Du ge bara dem spänning (ca 5v för mottagaren, och upp till 12v för sändaren) och signalen på sändarens data stift replikeras på mottagaren.
I min krets drivs data stiftet på sändaren av en utgång på bild. Jag tänker arbeta mer på PIC-programmet att ge en faktiska data protocol, utan för att faktiskt få detta gjort i helgen, sändaren PIC för närvarande bara en hög signal för 500ms, då går låg för 500ms och upprepas så länge som den slås på. Det finns en LED som bifogas utgångsstiftet att ge en visuell feedback av pulsen så att du vet kretsen arbetar.
Mottagaren är lika enkel i dagsläget. Data stift går till en ingång på bild. PIC väntar en hög signal, då pulser LED så länge signalen är hög. När insignalen är låg, PIC väntar 500ms och avsöker input igen.
Här är koden för nu: * Obs * faktiska slingan att göra LED pulsen togs från ett exempel på Sparkfun forum användare cheesy och bara ändras så att den kör långsammare
Sändare:
#include < 12F683.h >
#use delay(clock=4000000,int=4000000)
#use fast_io(A)
#fuses nomclr
void main)
{
set_tris_a(0);
While(1) {
output_high(pin_a4);
delay_ms(500);
output_low(pin_a4);
delay_ms(500);
}
}
Mottagare:
#include < 12F683.h >
#use delay(clock=4000000,int=4000000)
#use fast_io(A)
#fuses nomclr
void main)
{
unsigned int i, j, k, steg;
set_tris_a(0);
While(1) {
samtidigt (input(pin_a3)) {
steg = 1;
j = 0;
göra
{
för (; j < 100 & & j > = 0; j += steg)
{
för (k = 0; k < 10; k ++)
{
OUTPUT_HIGH(PIN_A1);
för (jag = j; i! = 0; i--);
OUTPUT_LOW(PIN_A1);
för (jag = 100-j; jag! = 0; i--);
}
}
steg * = -1;
j += steg;
} medan (j > 0);
}
delay_ms(500);
}
}

Barns Robot kostym med ljudeffekter, godis detektor och mer

Steampunked detektor för fluorescerande tätningar och kontrollstämplar

Arduino Stress detektor

9V IR-detektor

Bygga en Pocket joniserande strålning detektor (PIRD)

Baja snögubbe presentkort eller utsmyckning

Jul 2015 snögubbe

Candy Bar snögubbe

Söt och enkel Christmas snögubbe!

DIY Egg snögubbe / DIY jul

Vill du bygga en snögubbe (laser applikation)? -gjort på Techshop

Dekorativa snögubbe

Avskyvärda snögubbe

Bygga din egen Ghost mätare/falska detektor av saker

Knut din vanliga snögubbe

Julerbjudande - Santa detektor och mer
En mycket enkel närhet detektor

Lufta föroreningar detektor
