RB2 rinnande rutor. (4 / 4 steg)
Steg 5: Varför kör rutor?

Tja, hittills för död räkenskap: kontinuerligt uppskatta, manövrera och korrigera fel. Även när utförat mycket väl, är det fortfarande bara en modell av verkligheten. Jag beskrev redan en hel del störningar som kommer att ingen del av modellen. Så, definitionsmässigt bot kommer aldrig köra exakt (100%) rak eller kommer någonsin vända exakt 90 grader.
Effekterna av en avvikelse i den körande riktningen är betydande (vid körning i en ny riktning, bot kommer att aldrig hamna där det är tänkt att). Det är en bra anledning för att ytterligare kalibrera.
Lyckligtvis finns det ett enkelt sätt att göra detta. Borenstein et. Al. utvecklat en metod som utförligt beskrivs i:
UMBMark - en metod för att mäta, jämföra och död räkenskap fel korrigeras i mobila robotar
( http://www-personal.umich.edu/~johannb/umbmark.ht... )
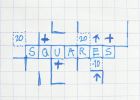
Kort sagt denna metod kommer ner till: kör en kvadrat medsols och sedan kör samma kvadratiska moturs. Bilden nedan visar en betonad projektion av riktiga banan. CW och CCW är de fel som kan mätas efter att ha kört en kvadrat. Vinkel felet kan beräknas som:
(CW + CCW) / längden på en kvadratiska ben
Valfria felet kan multipliceras med en vinst. Detta fel kan slutligen läggas som en konstant fel att den kontrollerade delen för att balansera hjulen.
Det var allt för nu!

Rinnande näsa

8-bitars Mario Blanket - gjord från farmor rutor

3 DIY organisationen Life Hacks gjort från choklad rutor (VIDEO)

Hur man drar 2 osammanhängande rutor utan att lyfta din penna
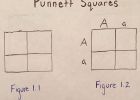
Med Punnett rutor att beräkna fenotypiska sannolikheter

Nutella Noir choklad rutor

Gratis återvunnet rutor för frakt och förpackning transportföretagens!

Desktop fontän för rofyllda ljudet av rinnande vatten

Enkla vintage nödställda displayen rutor

Citron Cheesecake rutor (eller trianglar)

Matematik Tricks, hur man hitta rutor i sekunder. GRE katt APTITUDE, GMAT hastighet matematik
Variationer på en klassiker: prickar och rutor
Hur man gör mödrar dag origami ros choklad rutor!

Hur man konstruerar en rinnande vatten bassäng för att utveckla flera analoga bilder

Cathedral Windows täcke rutor

Jordnötssmör & choklad rutor
128 laser skär rutor

Anpassningsbara 3D Printable rutor