RB2 rinnande rutor. (3 / 4 steg)
Steg 4: Kontrollera svängar

Körning (nästan) rakt, med en riktad hastighet och en viss sträcka i centimeter är viktigt för att ha den bot körs kvadrerade banor, men vi behöver också bot att göra svängar i 90 grader. En perfekt 90 graders sväng är igen ett mål, men inte alltid verkligheten. Samtidigt vrida det blir också en hel del möjliga störningar (t.ex. halka hjul).
Med hjälp av kodare till kontroll möjligt vänder sig för oss att få tillfredsställande resultat så nära som möjligt till målet. Hur detta kan göras är ganska rakt framåt: beräkna avståndet för hjulen att vända i fästingar och har bot Vrid tills att specifika mängden fästingar har uppnåtts.
Den styrande delen redan anges mängden fästingar per grad (se början av denna blogg). När multiplicerat med mängden grader att vända, får vi mängden fästingar att producera.
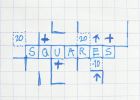
Mängden fästingar per grad beror på helt varv omkretsen. Det belopp som nämns i början av denna blogg är baserad på att vrida bot med hjulen på båda sidor roterande counter wise. I detta fall mitten av helt varv omkretsen är centrera av bot bot bredd motsvarar diametern på helt varv omkretsen.
Det är också möjligt att stänga bot genom att ha motorerna köras på bara en sida av bot. I så fall ger den fulla bredden av bot radien av helt varv omkretsen.
Bilden nedan visar skillnaderna mellan båda sätten att vända. Beroende på den valda metoden har styrning variabeln beräknas annorlunda.
Det är min personliga åsikt att differential turn (båda sidor counter wise) kommer att producera mindre störning och därför bättre resultat (kortare tur, mindre friktion på hjulen).
Coding detta som en funktion i Python, ger oss möjlighet att använda alla olika slags vinklar. Det enda att tänka på är att minst 1 Markera produceras och som sätter den minsta vinkel som kan användas.

Rinnande näsa

8-bitars Mario Blanket - gjord från farmor rutor

3 DIY organisationen Life Hacks gjort från choklad rutor (VIDEO)

Hur man drar 2 osammanhängande rutor utan att lyfta din penna
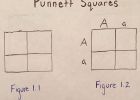
Med Punnett rutor att beräkna fenotypiska sannolikheter

Nutella Noir choklad rutor

Gratis återvunnet rutor för frakt och förpackning transportföretagens!

Desktop fontän för rofyllda ljudet av rinnande vatten

Enkla vintage nödställda displayen rutor

Citron Cheesecake rutor (eller trianglar)

Matematik Tricks, hur man hitta rutor i sekunder. GRE katt APTITUDE, GMAT hastighet matematik
Variationer på en klassiker: prickar och rutor
Hur man gör mödrar dag origami ros choklad rutor!

Hur man konstruerar en rinnande vatten bassäng för att utveckla flera analoga bilder

Cathedral Windows täcke rutor

Jordnötssmör & choklad rutor
128 laser skär rutor

Anpassningsbara 3D Printable rutor