RC svävare + 3D (.stl & .skp filer) utskrift (7 / 8 steg)
Steg 7: kontrollera
Kontrollera en svävare är en knepig del,
För bästa resultat (från min synvinkel), jag gillar lyfta motorn att starta första och när denna motor är på dess 20% från sedan pusher motorn kommer i aktion, detta sätt friktionen minskar och du får en fin batteritid ur pusher motorn.
Jag arbetar på en ny video med en olika sändare, så som rullas ut snart. Som jag sa i mitt tidigare Instructable. Jag använder det modifierade sändaren för min svävare, det finns ingen skillnad mellan denna Tx och en normal Tx förutom denna Tx inte har en roder kontroll men ändå.
Om du vill se videon av programmering denna sändare klicka här
Hur att programmera din sändare (hur man kan blanda båda motorerna på min svävare)
som när lyfta motorn ligger på 20%. då pusher motorn startar men det finns ingen sådan blandning i min sändare. Detta är hur du gör det, du kommer att kalibrera lyfta motorn normalt. För pusher motorn kommer du flytta gas pinne tillbaka som vanligt men bara 3/4. avståndet från toppen som innebär att jag lämnar 1/4th portion (från botten) så att sätt ESC kommer att tycka att dessa är gasspjället pinnen slutpunkter. Och när jag flytta gas pinne (medan testing) lyfta motorn startar men mataren kommer inte, på grund av detta döda band som du skapade med flit och när du flyttar det även ytterligare pusher motorn kommer i aktion!

3D utskrift enda Stick mekanism

Grundläggande arbetsflöde för 3D-design i Sketchup och 3D-utskrifter @ home:

3D-utskrifter med Shapeways.com och Sketchup - hemliga dekoder hjul!

Nybörjarguide till 3D-utskrifter med Objet Connex 500: hur man bygger en missil bärraket Tank (och rensa i röran som du gjort i processen)

Från bild till verklighet! 3D-utskrift i praktiska!

Hur att göra 3D-utskrifter i hem och kontor säkrare, genom att bygga en inhägnad som filtrerar gaser och partiklar

Skriva ut en Robot pincett, från Installation av programvara - beställa en utskrift.

Hur man ställer in Slic3r korrekt för bra utskrifter utan extruder problem

Hur man teleportera! Gratis 3D-Scanning och billiga 3D-utskrifter!
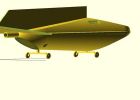
3D utskrift en bisarr flygplan Design från 1900-talet

3D-utskrifter med Mathematica
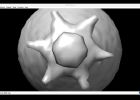
Automatisk 3D-utskrift av Virus modeller från databaser

Tekniker för 3D utskrift i Nylon

Förbereda 3D scannar för 3D-utskrifter, med Rhino och Netfabb Pro

Fokus, en experimentell pulver utskrift plattform
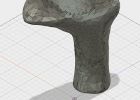
Att göra en anpassad 3D utskrivbara fot modell (.stl)

Att öka bröstcancer medvetenhet med 3D utskrift

Lättare skärm utskrift
