Reginald: en UDP-övervakning bot; kontroll via Internet (11 / 26 steg)
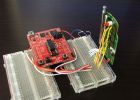
Steg 11: Lägga till Servo stiften



Om diagrammet visas:
I 1: a bilden, kan du se jag planerar för "Vänster hjul", "Höger hjul", "Pan" och "Tilt" servon. Höger och vänster hjul servon uppenbarligen driva hjulen för Reginald. Panorering och vippning servon är för panorering och vinkla kameran och torn på Reginald. Det finns två oberoende servon för vippning och en servo panorera både kameran och torn.
Signal trådar av Tilt hakparenteserna binds tillsammans så de är synkade med varandra. Mitt mål var att ha kameran och torn för att flytta ihop. Detta sätt, där allt kameran är spetsiga torn brand.
Testning:
När allt är wired och ansluten, testa genom att ansluta den till Ethernet Shield på Arduino. Om du höll samma stift som jag har, kan du helt enkelt ladda koden på styrelsen. Ställ dig som du gjorde när du växlas LED. Använda GUI för att försöka kontrollera några av servon. När du trycker upp, flyttar hjulet servon?

Android-baserade hemautomation via internet och Ethernet-

Mobil Garage dörröppnare via internet

Arduino kontroll via en webbtjänst med Teleduino

Styra Intel Edison med anpassade Android app via Internet.

Prata med din enhet via internet

Monitor kamera och Relay kontroll över Internet

Styra en Servo via Internet
Servo motorisk kontroll via bluetooth med potentiometer
Radar (joystick kontroll) via Labview(+Arduino)

Världens första fjärrkontrollen mänskliga via Internet

Puls övervakning ansökan via e-post

Mobilapplikation för övervakning och kontroll Arduino, använder kito.io IOT plattform

Köpa Biodynamic viner via Internet

Remote control kontrolleras via Internet

Arduino relay kontroll över internet

Hur att träffa riktiga människor via internet
Styra tre eluttag från en dator trådlöst

Luftfuktighet och temperatur reagerar Lightsource
