Resistance styrd larm (4 / 13 steg)
Steg 4: Microcontroller kod

Här är några exempel på kod som du kan använda för att starta projektet.
Du kan antingen kopiera och klistra in den i en ny skiss eller du kan ladda ner den bifogade filen.
Sedan ladda upp den till din styrelse.
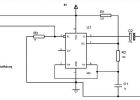
int alarmPin = 2; Piezo summern ansluten till digital stift 2 int motionSensorPin = 13. Rörelsesensor ansluten till digital stift 13 int resistanceSensorPin = 5; Mittstiftet av motstånd ansluten till analot stift 5
int sensorHoldTime = 2000. Som motstånd måste vara inom intervallet att aktivera larm int resistanceSetValue = 512; Inställning för motstånd värde int resistanceSensorValue = 0; Ingångsmotstånd läsa int motionSensorState = låg; Lagra om motion är dected int armState = låg; Är larmet beväpnade int triggerState = låg; Har larmet utlöst osignerade långa currentTime = 0; nuvarande tid int fördröjningstid = 10000; Fördröjning mellan upptäcka rörelse och larm osignerade långa activateTime = 0; butiker-tiden som larmet utlöses
void setup() {pinMode (alarmPin, produktionen); / / anger det digitala stiftet 2 som output pinMode (motionSensorPin, ingång); / / sätter det digitala stiftet 13 som ingående Serial.begin(9600);}
void loop() {currentTime = millis(); resistanceSensorValue = analogRead(resistanceSensorPin); / / läser motstånd värde
om (abs (resistanceSensorValue - resistanceSetValue) < 10) / / om motstånd i målintervallet, aktivera larm {delay(sensorHoldTime); resistanceSensorValue = analogRead(resistanceSensorPin); om (abs (resistanceSensorValue - resistanceSetValue) < 10) {armState =! armState; / / växlar väpnade staten triggerState = låg;
IF(armState == High) / / räkna ner dröjsmål efter beväpna larm {Serial.println(); Serial.println("Arming");
för (int jag = 10; Jag > 0; i--) {Serial.println(i); delay(1000);} Serial.println("Armed"); }
IF(armState == low) / / avväpna larm med fördröjning {Serial.println(); Serial.println("disarming"); Delay(5000); } } }
motionSensorState = digitalRead(motionSensorPin); Läs resultatet av rörelsesensor
om (armState == hög & & motionSensorState == hög) / / om rörelse detekteras, och systemet är beväpnad {om (triggerState == låg) {digitalWrite (alarmPin, hög); //notification pip att påminna dig att avaktivera larm delay(100); digitalWrite (alarmPin, låg); triggerState = hög; activateTime = currentTime; Serial.println("triggered"); Serial.println ("alarmet kommer att ljuda i 10 sekunder"); } }
om (triggerState == hög & & (currentTime > activateTime + fördröjningstid)) //sound larm om det inte är stängt i tid {Serial.println("Alarm") digitalWrite (alarmPin, hög); delay(500); digitalWrite (alarmPin, låg); delay(500);}
}

Vatten tank larm

Larm.

LED Sunrise väckarklocka med anpassningsbara låten larm
Cirkelträning Diagram av vattennivån larm med 555 Timer

555 larm / timer krets [mycket EASYYY!]

Bil / motorcykel eller cykel trådlös 2.4 ghz larm intervallet 500m 10$ budget

Badrum larm

Hemliga fack larm låda

Arduino avstånd Display och larm

Altoid Tin tyst larm

Påse rörelse larm för identitetsstöld förebyggande

Du installerar en spion 5000 tvåvägs motorcykel larm till en Honda 1998 CB250 Nighthawk

Hur man gör en enkel och billig ljud larm

Skällande hund larm

Billiga larm Sensor

Koka larm

Avståndet mätanordning med automatiska larm

Platt säkerhetssystem med GSM larm