Servo motorisk kontroll med hjälp av Microcontroller PIC16F877A (1 / 6 steg)
Steg 1: R/C Servo reglerteknik

En RC servo är en analog enhet; underlaget är en PWM-signal på digital spänningsnivån. Denna puls är mellan 1,0 och 2,0 ms lång och repetitioner varje 20 ms. Längden för PWM pulse bestämmer placeringen av servo är hjulet. En 1.0-ms puls kommer hjulet att gå till 0 grader och en 2.0-ms puls kommer att orsaka hjulet att gå till 90 grader.
Pulse bredd Modulation (PWM)
Pulse bredd modulering (PWM) är en av de kraftfulla tekniker används i system i dag. De används inte bara i stort antal kontroll ansökan som inkluderar: fart kontroll, makt kontroll, åtgärd och kommunikation.
Grundläggande principen för PWM
PWM uppnås med hjälp av en fyrkantsvåg vars intermittens ändras till få en varierande Matningsspänning till följd av medelvärdet av vågform. En matematisk förklaring till detta ges nedan:
Överväga en fyrkantsvåg som i figuren ovan. Ton är den tid för vilken produktionen är hög och fičuru är den tid för vilken utgång är låg. Låt Ttotal vara tidsperiod av vinka så att
Månadskapacitet för en fyrkantsvåg definieras som:
Den tillverkade spänningen varierar med arbetscykel som:
Så kan du se från den sista ekvationen utspänningen direkt kan varieras genom att variera Ton värdet.
Om tonen är 0, Vout är också 0.
Om tonen är Ttotal sedan Vout är Vin eller säga maximalt.
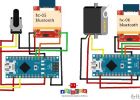
Servo motorisk kontroll via bluetooth med potentiometer

Arduino motoriska kontroll Kit

QuickStart dubbelriktad motorisk kontroll

Arduino - WEBCAM PAN TILT kontroll med servon & KY 023 Joystick

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

Trådlös Gimbal kontroll med Google glas
AUTOMATISK ljus på/av kontroll med hjälp av TIMER

LED kontroll med hjälp av Arduino Bluetooth och Android. (Del 1)

Servo kontroll med hjälp av LinkIt en

Arduino servo kontroll med hjälp av ultraljud sensor

Servo kontroll med en Flex/Bend Sensor

Kraftfull kontroll med Arduino: Gränssnitt ett linjärt ställdon

Fjärr iPad Mount kontroll med hjälp av WF32

Projektor IR-kontroll med hjälp av Arduino Uno
Basic (PWM) varvtal kontroll med 555 Timer ICs

ATTiny45/85 LCD Visa kontroll med ett skiftregister, programmerat i Arduino

Android Aplication för Robot kontroll med hjälp av HC-05 och Arduino (Android Studio)

Android CNC-kontroll med GRBL
