Sub-Centimeter GPS med RTKLIB (3 / 4 steg)
Steg 3: exempel



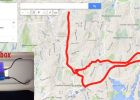
Basstation: EUREF/SVTL
Datum: 2013-12-28 (vecka = 1772 DOY = 362)
Tidsintervall: 100 ms tid justering: 1s
Avståndet till basstation: ~0.8 km
Geoiden/Pseudo-geoid modell: EGM2008
Mätning webbplats: nära SVTL
Antenn: Trimble Bullet III 3.3V
Mottagare: EVKEN-6T-0
Bild av resultaten ovan.
Den närmare du Rovern är att basstationen desto mer exakt blir du resultatet. Jag skulle inte gå längre än 20km.
Alla stater i USA bör ha sänder basstationer som täcker de flesta staten (vanligtvis DOT). Några tar ut en nominell arvode och några kostar $1000 för åtkomst.
Navio + Raspberry Pi från Emlid har också några tutorials och produktförslag för att använda RTKLIB. Vilket är vad jag för närvarande arbetar på.
Stöds mottagare under maskinvara som stöds.
http://wiki.OpenStreetMap.org/wiki/RTKLIB
Slipat pläterar (jordplan) behövs också i hög noggrannhet applikationer. Vanligtvis en ledande skiva λ/4 i radie. Så för GPS = 1575mhz våglängd = 19cm 9,5 cm (~ 4"+) och upp kommer att isolera antennen bra. Större är alltid bättre.
Mer Detaljer för RTK fixa lösning:
http://community.emlid.com/t/issues-with-rtklib-Fix-using-neo6-t-dongle

Netduino GPS med LCD-skärm

Arduino Mega GPS med LCD och SD loggning

Fullständig förståelse gjort enkelt - GPS med ARDUINO

Intro till GPS med Microcontrollers

Spåra din position utan att använda GPS (med LAC och CID)

Skicka varning plats informera till Twitter med hjälp av GPS med WIZwiki-W7500

Förvandla din telefon till en GPS med K'nex!

ANVÄND DIN GARMIN E-TREX LEGEND GPS MED GOOGLE EARTH.

Enkla Arduino GPS med OLED

Mobiltelefon hållare hållare för cykel/bicyle-med lätthet hörlurar förlängning hacka, kamera hacka och gps (bonusmaterial!)

Mediatek linkit en - Bygg din egen spårning webbplats med hjälp av linkit en GPS, GPRS och JSP med Google karta

Ryggsäck GPS tracker

Hur man bygger en glasfiber Sub låda

Hur man bygger en Quadcoptor. (NTM 28-30S 800kV 300W och Arducopter APM 2.6 & 6 H GPS 3DR Radio och FlySky TH9X)
DIY GPS datalogger för du nästa enhet/vandringsled

Raspberry Pi & Neo 6M GPS

Knex kel-tec SUB 2000

RGB Led lampa med IR-kontroll
