TrashIoT - Lixeira inteligente com Intel Edison (3 / 3 steg)
Steg 3: Código
Toda en codificação foi feita utilizando en IDE Arduino hacer 1.6.5, foramacie utilizados os seguintes periféricos da placa, comunicação I2C para o display, GPIOs para summern e ultrassom, sinal PWM para controle göra servo motor e conexão Wifi para realização dos Tweets.
En medida de distância utilizando os sensores ultrassom é feita basicamente colocando um pulso nr pino de TRIG e aguardar o retorno da svar nr pino de ECHO, baseado ingen tempo em que o pulso demora para retornar e na velocidade som é realizado o cálculo da distância.
O Summer reproduz o áudio com um sinal PWM que é gerado partir das frequências das anmärkningar e SLU respectivas pausas e tempon de duração.
Para en comunicação com o LCD foi utilizada en billioteca para Arduino fornecida pela Lund.
O uso gör servo motor foi feito utilizando-se en biblioteca para controle de servo fenor disponível na IDE arduino.
Inte tweet foi utilizado como referência um trabalho proposto aqui ingen instructables:
O código segue em anexo.

Utilizando o Intel Edison para Monitorar Temperatura em Cidades Inteligentes

Tryck till data.sparkfun.com från en Intel Edison med Node.js

Backup/Restore Intel Edison

Automatiserad gardin med intel Edison & thethings. IO

Komma igång med Intel Edison - Python programmering

Goodbam - insamling av bra/dåliga sova uppgifter av Intel Edison

Intel Edison Arduino bryta strålen lasersensor

Intel-Edison katt anrikning enheten (iskallt)

En Nybörjarguide till Intel Edison
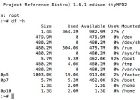
Öka Root Partition storlek av Intel Edison med Release 2 beta Linux bild

Programmerbara MIDI Synth med Intel Edison och Csound

QR koden betalning enhet använder Intel Edison

En omfattande Intel Edison komma igång-Guide

Cloud seismograf med Intel Edison

Färg spårning med hjälp av Intel Edison Development Kit

Geiger ryggsäck med Intel Edison

Dagis övervakning och spårning System med Intel Edison Development Kit
Anslutning av Intel® RealSense™ 3D-kamera med Intel® Edison
