Universal High-Power LED Driver med 3D-printable fall (3 / 8 steg)
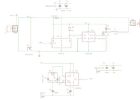
Steg 3: krets

Boost omvandlare på Wiki: http://en.wikipedia.org/wiki/Boost_converter
Buck-boost omvandlare på Wiki: http://en.wikipedia.org/wiki/Buck-boost_converter
Som ni kan se att dioden och en kondensator på utdata typisk av switch mode converter utelämnas. Detta är eftersom belastningen (LEDs) är i huvudsak en diod, och lysdioder kan utföra ganska bra med pulserande nuvarande. Genom att ta bort likriktaren kretsen, totalt förmåga effektivitet förbättras, liksom ljusreglering spänna.
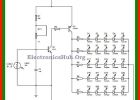
Den här domänkontrollanten stöder två olika växla lägen; Buck-boost och boost. Buck-boost-läget kan utspänning lägre eller högre än det ingående utbudet, medan boost-läget kan endast mata högre spänning än de ingående utbudet. Du kan fråga, så varför vi någonsin behöver öka läge? Eftersom verkningsgraden förbättras när indata- och spänning är närmare. Så om du behöver alltid högre utspänning än input, det är bäst att använda boost-läget. Läget kan väljas genom att ansluta lysdioder till de olika utgångar.
Q1 (MOSFET) växlar de nuvarande flödena igenom induktor L1. Nuvarande sedan flyter genom R5, detta är den "aktuella känslan" resistor som skapar spänning som är proportionell mot strömmen. Denna spänning är övervakade av mikrokontroller (via R4) att kontrollera den effekten som går till lysdioderna. Den grundläggande principen är att komparator inuti mikrokontroller jämför den nuvarande bemärkelse spänningen med referensspänningen. Q1 är avstängd när den nuvarande bemärkelse spänningen är högre än referensspänningen. Mikrokontroller styr den nuvarande L1 genom att kontrollera referensspänningen.
(se avsnittet Firmware för detaljer)
För det nuvarande bemärkelse motståndet, jag använde fem 1 ohm resisters parallellt istället för att använda en enda 0,2 ohm resister (fem 1 ohm, 0.25W motstånd = 0.2 ohms 1.25W motstånd). Detta är vanligtvis mer ekonomiskt.
R3 och C5 bildar en "snubber" för att minska skadliga (ringmärkning) som visas när L1 nuvarande stängs av och skydda MOSFET från det. (http://en.wikipedia.org/wiki/Snubber)
Utspänningen är försvagad genom R6 och R7 och skickas till mikrokontroller. Denna spänning utlöser överspänning stängs, när utspänningen går högre än MOSFET tål (60V). (MOSFETs kan lätt förstöras av högspänning.) Denna situation kan inträffa när lysdioderna är frånkopplad, över drivna, eller är felkonfigurerad.
Huvudsakliga controller (PIC16F1823) tar insatsvaror från styrkrets och kontroll Q1 att uppnå önskad effekt. Jag väljer PIC16F1823 som controller för detta projekt. De viktigaste punkterna för att välja denna bild är att det har inbyggd analog kontrollapparater, och körs på 32MHz utan att du behöver en kristall.
Det är en säkring i avsnittet makt leverans. Förutom de vanliga över ström (över belastning) och Kortslutningsskydd, detta säkring skyddar omvänd spänning. Om du tittar på kretsen runt MOSFET Q1, kommer att omvänd spänning gå grundlig Q1, eftersom diod inuti MOSFET framåt är partisk. Induktor L1 har mycket lite motstånd, så detta skapar i huvudsak en kortslutning skick. Utan en säkring, kommer strömförsörjningen, MOSFET eller induktor att brännas. På grund av detta måste säkringen vara av "betydligt" typen.
BOM
5 x 1 ohm (R5A-E)
1 x 10 ohm (R1)
3 x 220 ohm (R8, R9, R10)
4 x 1 k ohm (R3, R4, R7, R13)
4 x 10 k ohm (R2, R12, R14, R15)
1 x 22 k ohm (R6)
1 x 47 k ohm (R11)
(alla resistorer är 1/4W carbon filmtyp)
1 x 10 k ohm Potentiometer (VR1)
1 x 2.2nF (2200pF) keramiska kondensator (C5)
6 x 0.1uF keramiska kondensator (C2, C3, C4, C6, C7, C9)
1 x 10uF/10V elektrolytisk kondensator (C8)
2 x 47-100uF/25V elektrolytisk kondensator (C1A, C1B)
1 x 47-100uH makt induktor (L1)
1 x 1N4148 diod (D1)
1 x LED (D2)
1 x MC78L05A eller motsvarande (IC1)
1 x NTD5867NL N-ch MOSFET (Q1)
1 x PIC16F1823 mikrokontroller (PIC1)
1 x GP1UX311QS IR-mottagare (tillval) (IC2)
2 x taktil switch (tillval) (SW1, SW2)
1 x 2A - 3A säkring (snabb-slag typ rekommenderas)

High Power LED Driver kretsar

Universal högeffekts LED Driver - firmwareuppdatering

High Power LED strålkastare. Oooo så ljus...

Den modulära PC NÄTAGG High Power LED växa ljuset

Enkla Buck LED Driver med PWM ingång

High Power LED uppladdningsbara ficklampa

High Power LED ljus - Digital lågan

High Power LED huvudet eller Bar Mount ljus

RGB LED Driver med IC 74c 14: nr Arduino!

Hacka 12 volt kinesiska led-lampa till usb power led lampa med stark ljusstyrka

High Powered LED Solar Lighting System

Power LED ljus-Bar omgivande belysning
PT4115 2A (eller mer) dimbara LED driver

High Power RGB LED Moodlamp som synkroniserar med Philips nyans

Billigt och enkelt urtavlan kontrollerade High Power RGB LED(s) Driver
Scorpion Stinger - en High Power UV LED ficklampa

Power LED - enklaste ljus med konstant-nuvarande krets
Auto natt lampa med High Power lysdioder