Utöka en mikrokontroller (2 / 4 steg)
Steg 2: Designa hjälpkretsar

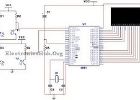
Detta är för en mobil robot, så jag lägger till två MOSFET H-Bridge motor förare (schematiskt för en visas). Men du kan lägga till en LCD-skärm, USB/parallell kommunikation hårdvara, stödja kretsar för fotodioder, etc. Beroende på din nivå av förmåga, kanske även någon form av bluetooth, WiFi och RF kommunikation faciliteter!
Grundläggande principer för kretskonstruktion tillämpas: vad du lägger till måste köra bort samma strömförsörjning som resten av kretsen (faktiskt, min motor förare kommer att delvis använda oreglerad makt, men de delar en gemensam grund). Det måste inte generera buller som stör MCU, får inte skapa stora spänningstoppar som kan förstöra MCU och måste samverka med det ström/spänning att på MCU kan ge (därav 4427 föraren, inte bara en direkt anslutning till MOSFETs).
Så för min motor driver, jag kommer att använda 4427 marker för att driva MOSFETs, kontrolleras av låg nuvarande 5v signalerna från MCU. Jag kommer att inkludera EMF skydd dioder och kondensatorer i olika storlekar och kemiska sammansättningar att stödja den kretsen effektbehovet. I praktiken innebär detta: en 47uF elektrolytisk kondensator och en 20uF tantal cap. parallellt över makt rälsen och en 0.1uF keramiska/andra cap. över makten rälsen för varje IC, precis som på MCU.
(Ett tips för att erkänna MOSFET typer från diagrammet: pilen pekar alltid N halvledare)
Jag kommer också att lägga till två lysdioder, en grön och en gul, kontrolleras av MCU. De behöver bara en 1K ohms motstånd i serie med dem, och de kan ansluta direkt till en extra stift. De ska användas som allmänna indikatorer, vilket är mycket användbart vid felsökning.
8051 mikrokontroller baserade dubbelriktad besöksräknare

8 LED cube (ingen mikrokontroller)

En enkel 2 timme PICAXE Project - spela låtar med en 08M 2 mikrokontroller för ungefär $10

8 bit seriell Digital till Analog (5v range) omvandlare för mikrokontroller (när TTL och resistorer är allt du)

Början Microcontrollers del 11: Timers, räknare och mikrokontroller klockan

Början Microcontrollers del 2: Att skapa ett SPI gränssnitt från programmeraren till mikrokontroller

Början Microcontrollers del 3: Överföra ett Program till mikrokontroller (drivrutiner)
Början Microcontrollers del 8: Lägga till en knapp till mikrokontroller och göra det göra något

ESP8266 som en mikrokontroller

Mikrokontroller baserade smarta batteriladdare

Vilka MIKROKONTROLLER för din elektroniska mode?

Hur man utformar en mikrokontroller inhägnad

Förvandla en dator till en mikrokontroller gratis i 4 steg
Sinusvåg frekvens mätning med hjälp av pic mikrokontroller

Mikrokontroller baserat automatisk belysningsintensiteten av gatubelysning

Ren sinusvåg växelriktare med pic mikrokontroller

Bygga och kod en MONSTER musikaliska teslaspole med en mikrokontroller

AC ström mätning med hjälp av skillnad förstärkare och mikrokontroller
