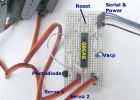
1000 steg Servo (3 / 4 steg)
Steg 3: Program


1000 steg Servo av TheSuperSewcio
#define pos 500 //servo position, använda 10-1010,
int avstånd; potentiometer kan ha problem med värden > 1010 eller < 10
void setup() {
Serial.BEGIN(9600);
pinMode (2, utgång);
pinMode (3, OUTPUT);
pinMode (4, OUTPUT);
}
void loop() {
Serial.println(analogRead(1));
avståndet = analogRead(1) - pos;
om (avstånd < 0) {
avståndet = - avstånd;
}
IF(Distance == 0) {
digitalWrite (3, låg).
} annat {if(distance < 100) {//reduces hastighet 100 steg före mål
analogWrite (3, avstånd + 50); lägsta hastighet: 50
} annat {
digitalWrite (3, hög).
}}
IF(analogRead(1) > pos) {
digitalWrite (4, låg). Ställ in rotationsriktning
digitalWrite (2, hög).
} else{if(analogRead(1) == pos) {
digitalWrite (2, låg). stoppar motor
digitalWrite (4, låg).
} annat {
digitalWrite (2, låg).
digitalWrite (4, hög).
}}
}
Ditt servo kan vara annorlunda än min, om av någon anledning något inte fungerar prova att ändra värden i linje 21 och 22.
Som ni kan se här, är servo ståndpunkt ibland exakt 500, ibland 499-501. Det beror på servo växellåda och potentiometer kvalitet.
Du kan också hämta .ino filen:

3D utskrift: gör Servo kontrollerad ventiler

Servo Feedback hacka (gratis)

1 000 steg projekt - mappa dina egna promenader vägar med Google Earth!
Control 2 Servo motorer med en vanlig fjärrkontroll

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Elektriska kanot

Värmesökande skrivbord fläkt (med Arduino)

Aquarium LED Light Controller baserat på Raspberry Pi

CRANE spelet

Byxor som ladda telefonen

DIY Johansson - bara en autonom Robot

Hemgjord r/c jet båt, inklusive jet drive

Trä Steampunk tema nycklar 3D Laser graverad och skär

Väckning taklampa
Servo kontroll

Bluetooth Servo kontroll

Laserskurna kedjehjul och servo kontroll av en ventil

Arduino VVS Servo termostat/Controller
